 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePGA: Personalizing Grasping Agents with Single Human-Robot Interaction
Paper and Code
Oct 19, 2023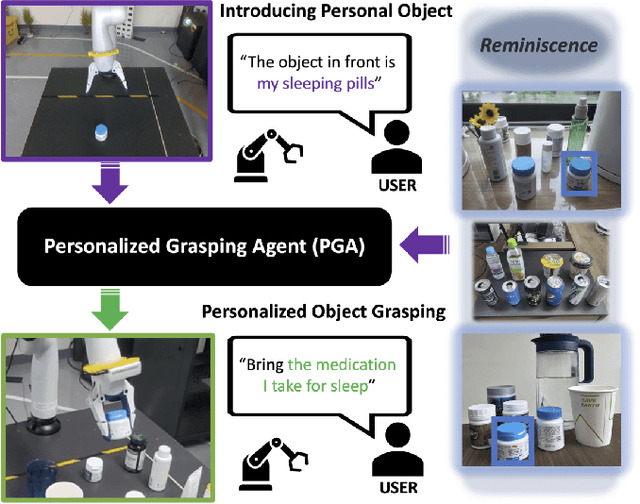
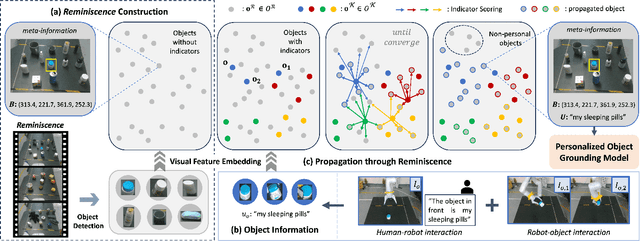
Language-Conditioned Robotic Grasping (LCRG) aims to develop robots that ground and grasp objects based on natural language instructions. While robots capable of recognizing personal objects like "my wallet" can interact more naturally with non-expert users, current LCRG systems primarily limit robots to understanding only generic expressions. To this end, we introduce a task scenario GraspMine with a novel dataset that aims to locate and grasp personal objects given personal indicators via learning from a single human-robot interaction. To address GraspMine, we propose Personalized Grasping Agent (PGA), that learns personal objects by propagating user-given information through a Reminiscence-a collection of raw images from the user's environment. Specifically, PGA acquires personal object information by a user presenting a personal object with its associated indicator, followed by PGA inspecting the object by rotating it. Based on the acquired information, PGA pseudo-labels objects in the Reminiscence by our proposed label propagation algorithm. Harnessing the information acquired from the interactions and the pseudo-labeled objects in the Reminiscence, PGA adapts the object grounding model to grasp personal objects. Experiments on GraspMine show that PGA significantly outperforms baseline methods both in offline and online settings, signifying its effectiveness and personalization applicability on real-world scenarios. Finally, qualitative analysis shows the effectiveness of PGA through a detailed investigation of results in each phase.