 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePAIL: Performance based Adversarial Imitation Learning Engine for Carbon Neutral Optimization
Paper and Code
Jul 12, 2024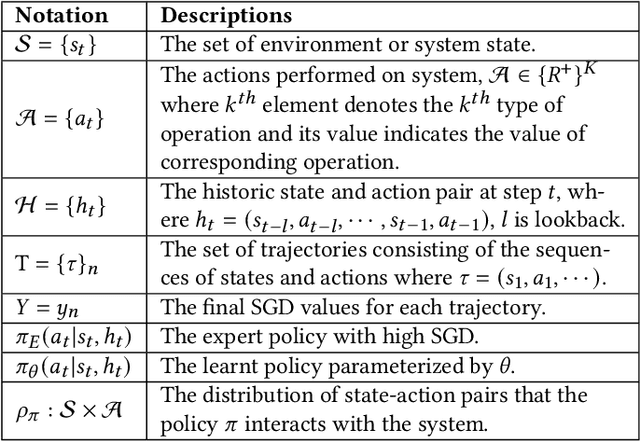

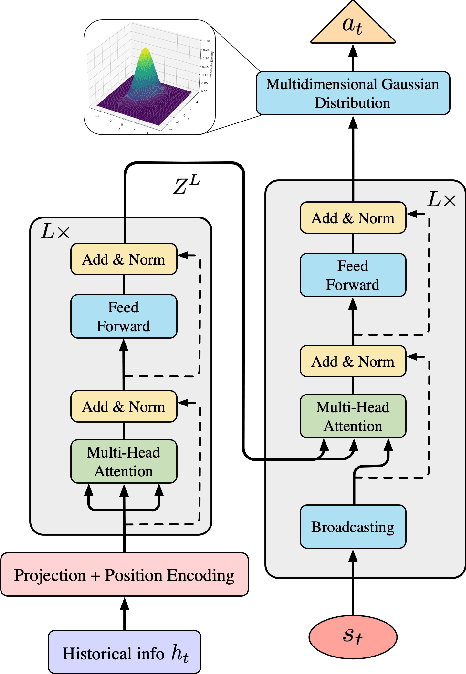
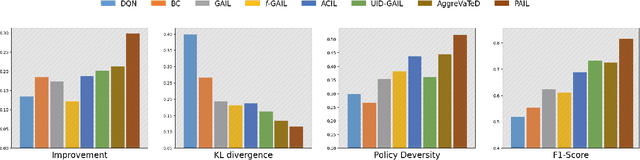
Achieving carbon neutrality within industrial operations has become increasingly imperative for sustainable development. It is both a significant challenge and a key opportunity for operational optimization in industry 4.0. In recent years, Deep Reinforcement Learning (DRL) based methods offer promising enhancements for sequential optimization processes and can be used for reducing carbon emissions. However, existing DRL methods need a pre-defined reward function to assess the impact of each action on the final sustainable development goals (SDG). In many real applications, such a reward function cannot be given in advance. To address the problem, this study proposes a Performance based Adversarial Imitation Learning (PAIL) engine. It is a novel method to acquire optimal operational policies for carbon neutrality without any pre-defined action rewards. Specifically, PAIL employs a Transformer-based policy generator to encode historical information and predict following actions within a multi-dimensional space. The entire action sequence will be iteratively updated by an environmental simulator. Then PAIL uses a discriminator to minimize the discrepancy between generated sequences and real-world samples of high SDG. In parallel, a Q-learning framework based performance estimator is designed to estimate the impact of each action on SDG. Based on these estimations, PAIL refines generated policies with the rewards from both discriminator and performance estimator. PAIL is evaluated on multiple real-world application cases and datasets. The experiment results demonstrate the effectiveness of PAIL comparing to other state-of-the-art baselines. In addition, PAIL offers meaningful interpretability for the optimization in carbon neutrality.