 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObjects in Semantic Topology
Paper and Code
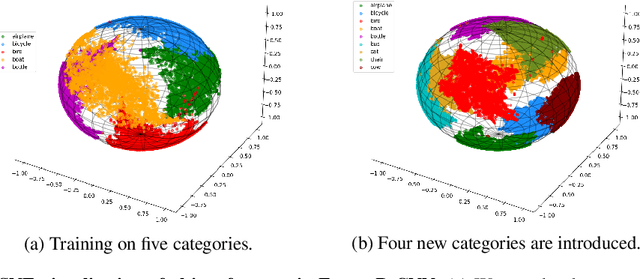
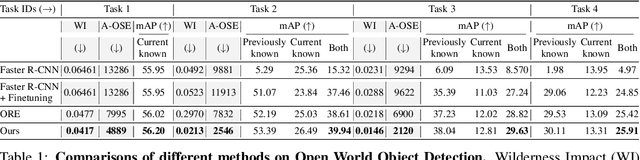
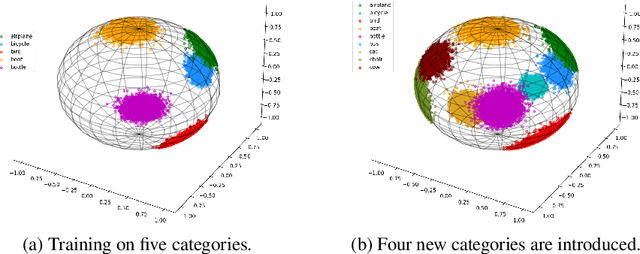
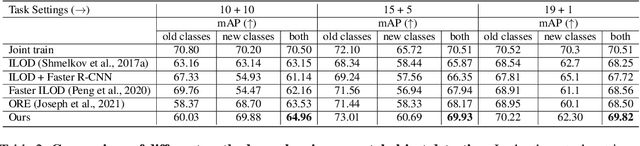
A more realistic object detection paradigm, Open-World Object Detection, has arisen increasing research interests in the community recently. A qualified open-world object detector can not only identify objects of known categories, but also discover unknown objects, and incrementally learn to categorize them when their annotations progressively arrive. Previous works rely on independent modules to recognize unknown categories and perform incremental learning, respectively. In this paper, we provide a unified perspective: Semantic Topology. During the life-long learning of an open-world object detector, all object instances from the same category are assigned to their corresponding pre-defined node in the semantic topology, including the `unknown' category. This constraint builds up discriminative feature representations and consistent relationships among objects, thus enabling the detector to distinguish unknown objects out of the known categories, as well as making learned features of known objects undistorted when learning new categories incrementally. Extensive experiments demonstrate that semantic topology, either randomly-generated or derived from a well-trained language model, could outperform the current state-of-the-art open-world object detectors by a large margin, e.g., the absolute open-set error is reduced from 7832 to 2546, exhibiting the inherent superiority of semantic topology on open-world object detection.