 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuromorphic Camera Denoising using Graph Neural Network-driven Transformers
Paper and Code
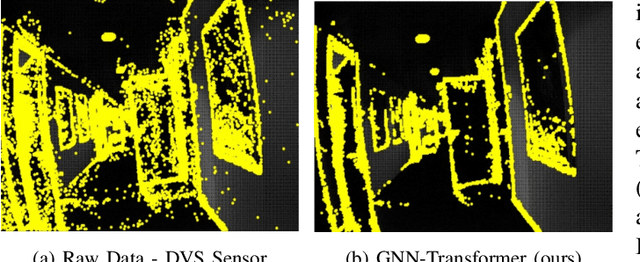
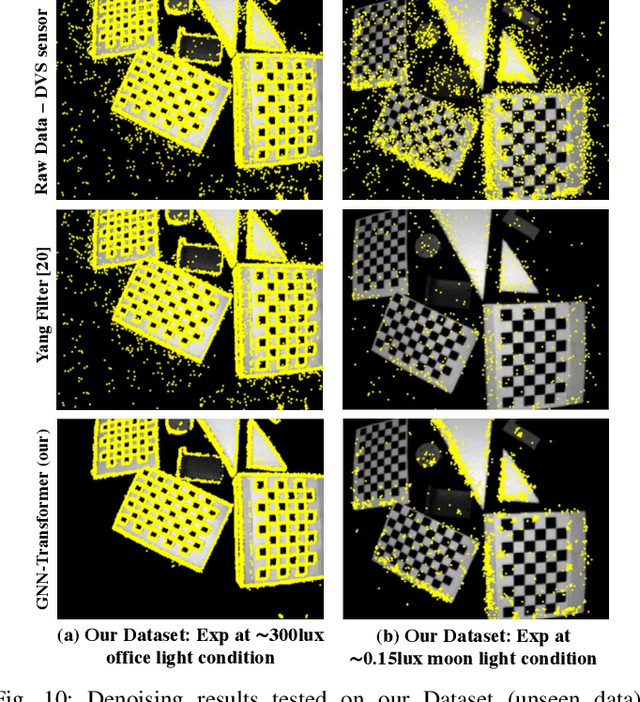
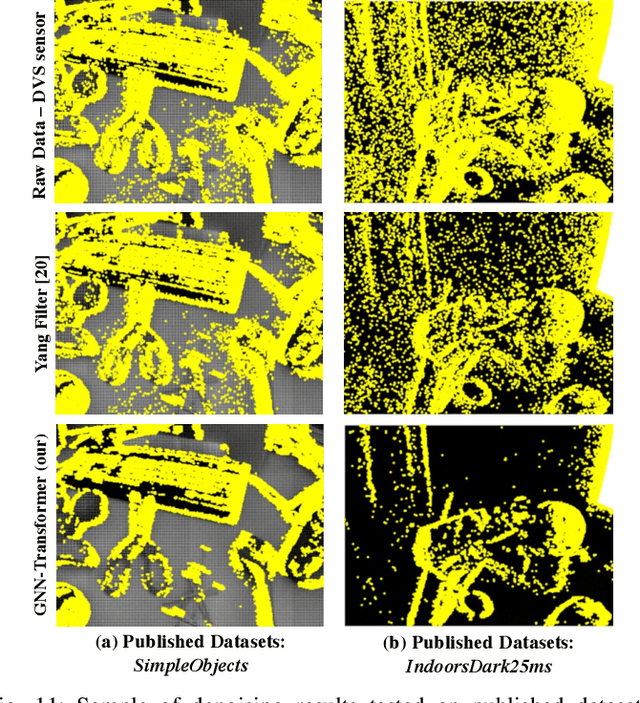
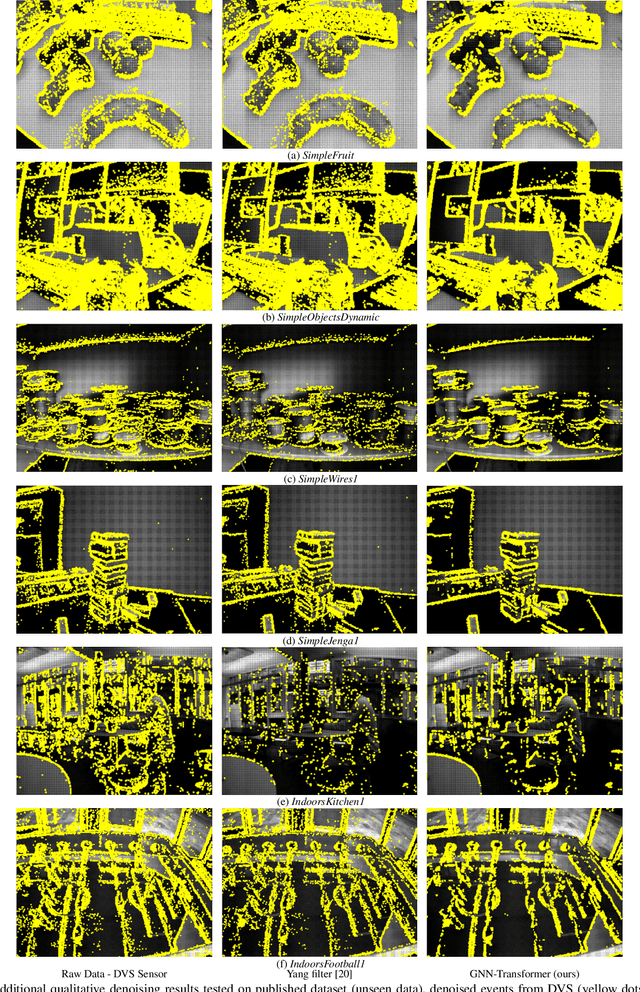
Neuromorphic vision is a bio-inspired technology that has triggered a paradigm shift in the computer-vision community and is serving as a key-enabler for a multitude of applications. This technology has offered significant advantages including reduced power consumption, reduced processing needs, and communication speed-ups. However, neuromorphic cameras suffer from significant amounts of measurement noise. This noise deteriorates the performance of neuromorphic event-based perception and navigation algorithms. In this paper, we propose a novel noise filtration algorithm to eliminate events which do not represent real log-intensity variations in the observed scene. We employ a Graph Neural Network (GNN)-driven transformer algorithm, called GNN-Transformer, to classify every active event pixel in the raw stream into real-log intensity variation or noise. Within the GNN, a message-passing framework, called EventConv, is carried out to reflect the spatiotemporal correlation among the events, while preserving their asynchronous nature. We also introduce the Known-object Ground-Truth Labeling (KoGTL) approach for generating approximate ground truth labels of event streams under various illumination conditions. KoGTL is used to generate labeled datasets, from experiments recorded in challenging lighting conditions. These datasets are used to train and extensively test our proposed algorithm. When tested on unseen datasets, the proposed algorithm outperforms existing methods by 12% in terms of filtration accuracy. Additional tests are also conducted on publicly available datasets to demonstrate the generalization capabilities of the proposed algorithm in the presence of illumination variations and different motion dynamics. Compared to existing solutions, qualitative results verified the superior capability of the proposed algorithm to eliminate noise while preserving meaningful scene events.