 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNDT-Transformer: Large-Scale 3D Point Cloud Localisation using the Normal Distribution Transform Representation
Paper and Code
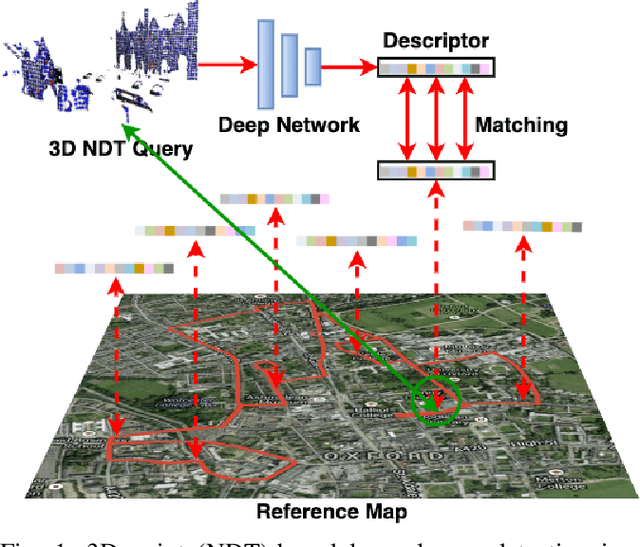
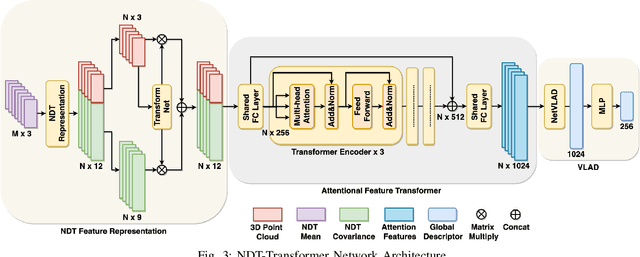
3D point cloud-based place recognition is highly demanded by autonomous driving in GPS-challenged environments and serves as an essential component (i.e. loop-closure detection) in lidar-based SLAM systems. This paper proposes a novel approach, named NDT-Transformer, for realtime and large-scale place recognition using 3D point clouds. Specifically, a 3D Normal Distribution Transform (NDT) representation is employed to condense the raw, dense 3D point cloud as probabilistic distributions (NDT cells) to provide the geometrical shape description. Then a novel NDT-Transformer network learns a global descriptor from a set of 3D NDT cell representations. Benefiting from the NDT representation and NDT-Transformer network, the learned global descriptors are enriched with both geometrical and contextual information. Finally, descriptor retrieval is achieved using a query-database for place recognition. Compared to the state-of-the-art methods, the proposed approach achieves an improvement of 7.52% on average top 1 recall and 2.73% on average top 1% recall on the Oxford Robotcar benchmark.