 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimax Optimal Online Imitation Learning via Replay Estimation
Paper and Code

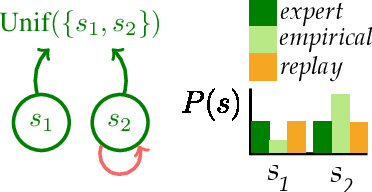

Online imitation learning is the problem of how best to mimic expert demonstrations, given access to the environment or an accurate simulator. Prior work has shown that in the infinite sample regime, exact moment matching achieves value equivalence to the expert policy. However, in the finite sample regime, even if one has no optimization error, empirical variance can lead to a performance gap that scales with $H^2 / N$ for behavioral cloning and $H / \sqrt{N}$ for online moment matching, where $H$ is the horizon and $N$ is the size of the expert dataset. We introduce the technique of replay estimation to reduce this empirical variance: by repeatedly executing cached expert actions in a stochastic simulator, we compute a smoother expert visitation distribution estimate to match. In the presence of general function approximation, we prove a meta theorem reducing the performance gap of our approach to the parameter estimation error for offline classification (i.e. learning the expert policy). In the tabular setting or with linear function approximation, our meta theorem shows that the performance gap incurred by our approach achieves the optimal $\widetilde{O} \left( \min({H^{3/2}} / {N}, {H} / {\sqrt{N}} \right)$ dependency, under significantly weaker assumptions compared to prior work. We implement multiple instantiations of our approach on several continuous control tasks and find that we are able to significantly improve policy performance across a variety of dataset sizes.