 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeasuring and Characterizing Generalization in Deep Reinforcement Learning
Paper and Code
Dec 11, 2018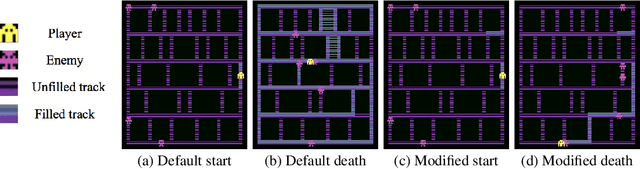
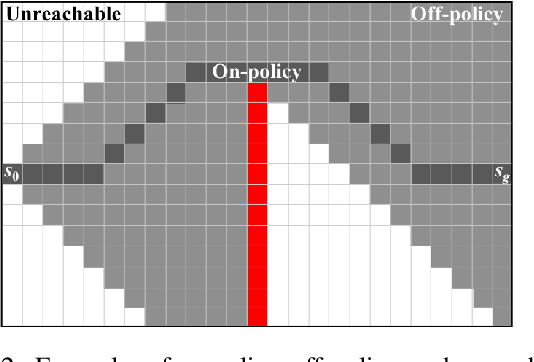
Deep reinforcement-learning methods have achieved remarkable performance on challenging control tasks. Observations of the resulting behavior give the impression that the agent has constructed a generalized representation that supports insightful action decisions. We re-examine what is meant by generalization in RL, and propose several definitions based on an agent's performance in on-policy, off-policy, and unreachable states. We propose a set of practical methods for evaluating agents with these definitions of generalization. We demonstrate these techniques on a common benchmark task for deep RL, and we show that the learned networks make poor decisions for states that differ only slightly from on-policy states, even though those states are not selected adversarially. Taken together, these results call into question the extent to which deep Q-networks learn generalized representations, and suggest that more experimentation and analysis is necessary before claims of representation learning can be supported.