Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaximizing the Use of Environmental Constraints: A Pushing-Based Hybrid Position/Force Assembly Skill for Contact-Rich Tasks
Paper and Code
Aug 12, 2022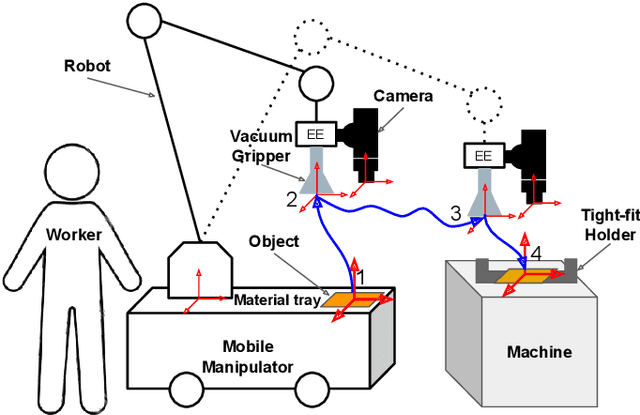
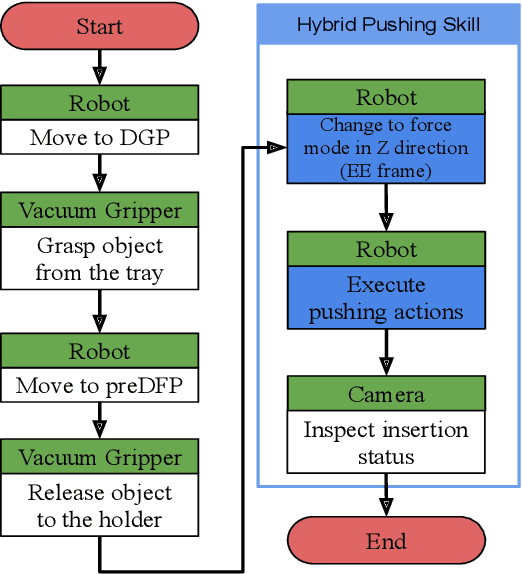
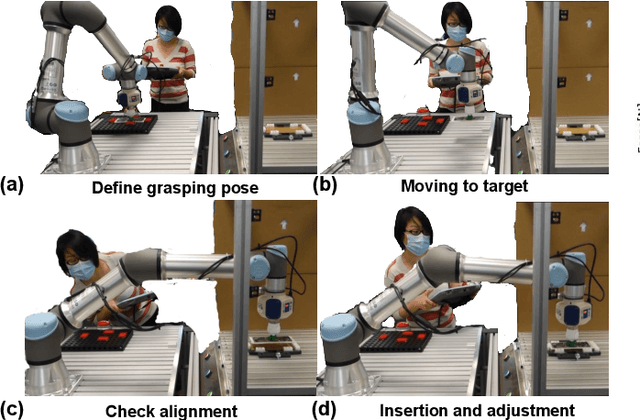
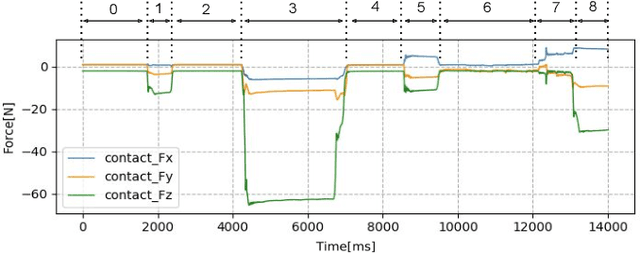
The need for contact-rich tasks is rapidly growing in modern manufacturing settings. However, few traditional robotic assembly skills consider environmental constraints during task execution, and most of them use these constraints as termination conditions. In this study, we present a pushing-based hybrid position/force assembly skill that can maximize environmental constraints during task execution. To the best of our knowledge, this is the first work that considers using pushing actions during the execution of the assembly tasks. We have proved that our skill can maximize the utilization of environmental constraints using mobile manipulator system assembly task experiments, and achieve a 100\% success rate in the executions.
* 6 pages, Published in: 2021 IEEE International Conference on Robotics
and Biomimetics (ROBIO)
View paper on