 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMADRaS : Multi Agent Driving Simulator
Paper and Code
Oct 02, 2020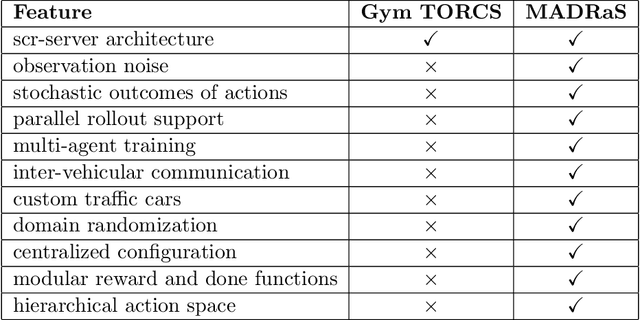
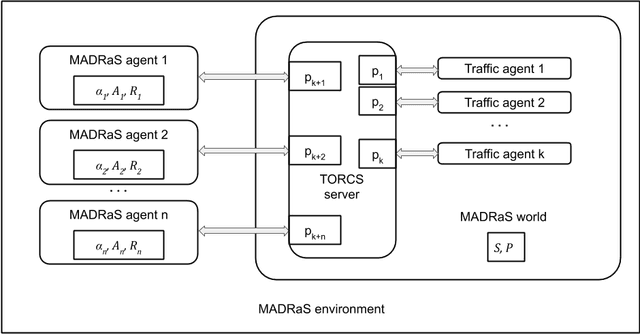
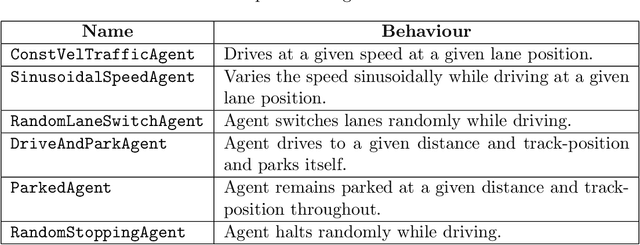
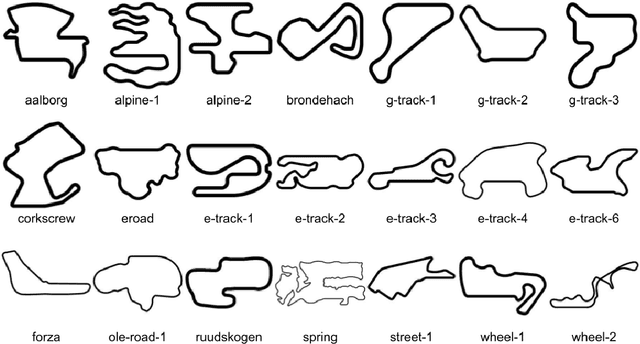
In this work, we present MADRaS, an open-source multi-agent driving simulator for use in the design and evaluation of motion planning algorithms for autonomous driving. MADRaS provides a platform for constructing a wide variety of highway and track driving scenarios where multiple driving agents can train for motion planning tasks using reinforcement learning and other machine learning algorithms. MADRaS is built on TORCS, an open-source car-racing simulator. TORCS offers a variety of cars with different dynamic properties and driving tracks with different geometries and surface properties. MADRaS inherits these functionalities from TORCS and introduces support for multi-agent training, inter-vehicular communication, noisy observations, stochastic actions, and custom traffic cars whose behaviours can be programmed to simulate challenging traffic conditions encountered in the real world. MADRaS can be used to create driving tasks whose complexities can be tuned along eight axes in well-defined steps. This makes it particularly suited for curriculum and continual learning. MADRaS is lightweight and it provides a convenient OpenAI Gym interface for independent control of each car. Apart from the primitive steering-acceleration-brake control mode of TORCS, MADRaS offers a hierarchical track-position -- speed control that can potentially be used to achieve better generalization. MADRaS uses multiprocessing to run each agent as a parallel process for efficiency and integrates well with popular reinforcement learning libraries like RLLib.