 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLRF-Net: Learning Local Reference Frames for 3D Local Shape Description and Matching
Paper and Code
Jan 22, 2020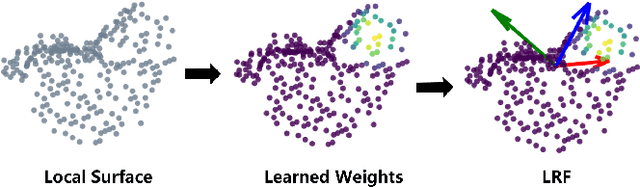
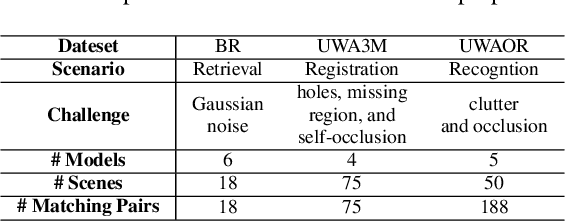
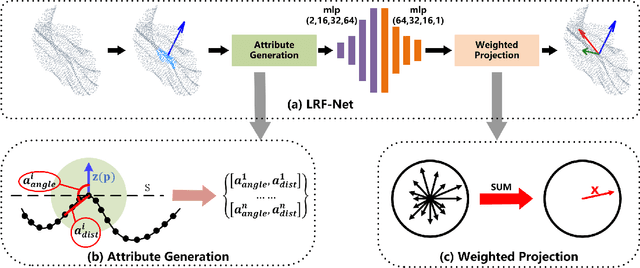
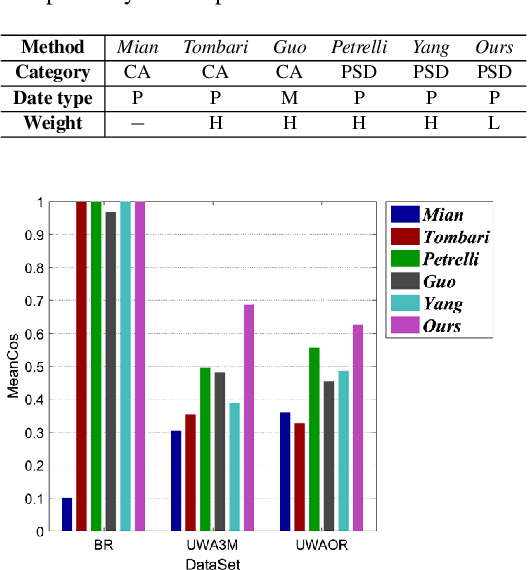
The local reference frame (LRF) acts as a critical role in 3D local shape description and matching. However, most of existing LRFs are hand-crafted and suffer from limited repeatability and robustness. This paper presents the first attempt to learn an LRF via a Siamese network that needs weak supervision only. In particular, we argue that each neighboring point in the local surface gives a unique contribution to LRF construction and measure such contributions via learned weights. Extensive analysis and comparative experiments on three public datasets addressing different application scenarios have demonstrated that LRF-Net is more repeatable and robust than several state-of-the-art LRF methods (LRF-Net is only trained on one dataset). In addition, LRF-Net can significantly boost the local shape description and 6-DoF pose estimation performance when matching 3D point clouds.