 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Whole-body Motor Skills for Humanoids
Paper and Code
Feb 07, 2020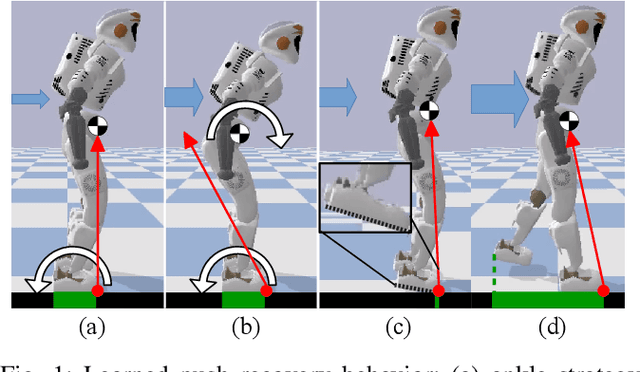
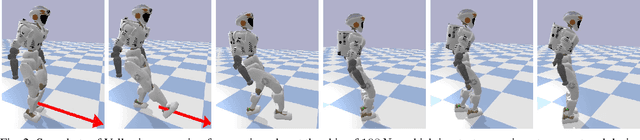
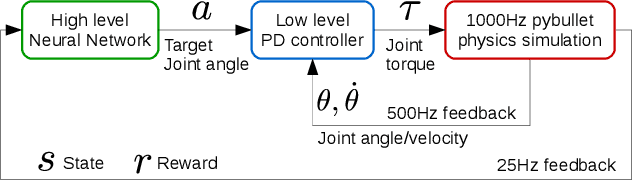
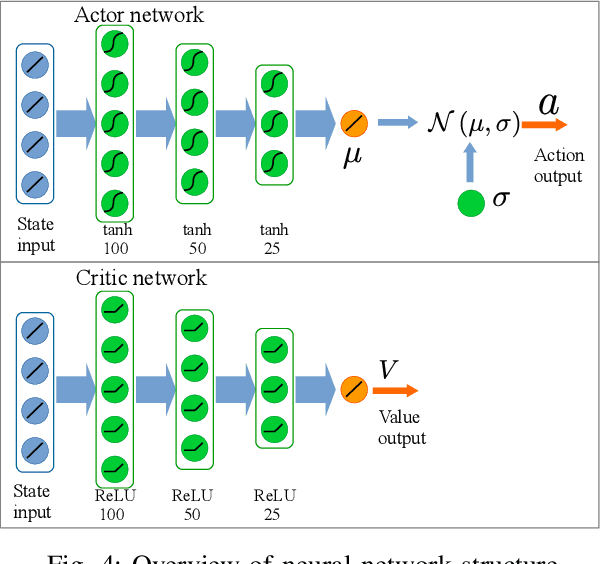
This paper presents a hierarchical framework for Deep Reinforcement Learning that acquires motor skills for a variety of push recovery and balancing behaviors, i.e., ankle, hip, foot tilting, and stepping strategies. The policy is trained in a physics simulator with realistic setting of robot model and low-level impedance control that are easy to transfer the learned skills to real robots. The advantage over traditional methods is the integration of high-level planner and feedback control all in one single coherent policy network, which is generic for learning versatile balancing and recovery motions against unknown perturbations at arbitrary locations (e.g., legs, torso). Furthermore, the proposed framework allows the policy to be learned quickly by many state-of-the-art learning algorithms. By comparing our learned results to studies of preprogrammed, special-purpose controllers in the literature, self-learned skills are comparable in terms of disturbance rejection but with additional advantages of producing a wide range of adaptive, versatile and robust behaviors.