 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Transformation Synchronization
Paper and Code
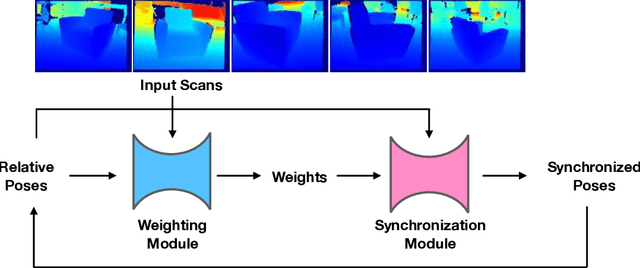
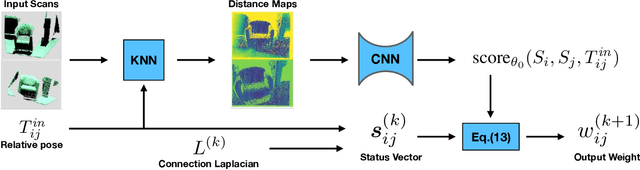
Reconstructing the 3D model of a physical object typically requires us to align the depth scans obtained from different camera poses into the same coordinate system. Solutions to this global alignment problem usually proceed in two steps. The first step estimates relative transformations between pairs of scans using an off-the-shelf technique. Due to limited information presented between pairs of scans, the resulting relative transformations are generally noisy. The second step then jointly optimizes the relative transformations among all input depth scans. A natural constraint used in this step is the cycle-consistency constraint, which allows us to prune incorrect relative transformations by detecting inconsistent cycles. The performance of such approaches, however, heavily relies on the quality of the input relative transformations. Instead of merely using the relative transformations as the input to perform transformation synchronization, we propose to use a neural network to learn the weights associated with each relative transformation. Our approach alternates between transformation synchronization using weighted relative transformations and predicting new weights of the input relative transformations using a neural network. We demonstrate the usefulness of this approach across a wide range of datasets.