 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Drive in a Day
Paper and Code
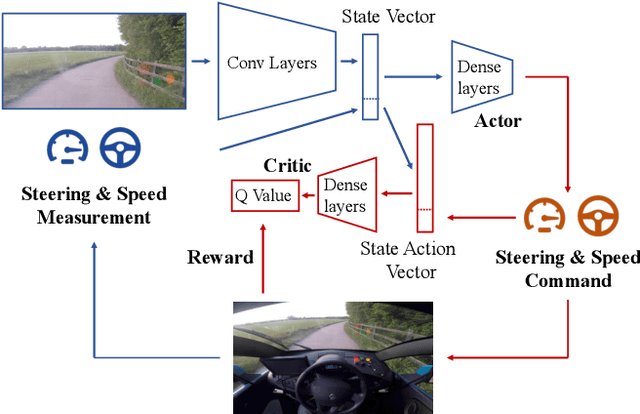
We demonstrate the first application of deep reinforcement learning to autonomous driving. From randomly initialised parameters, our model is able to learn a policy for lane following in a handful of training episodes using a single monocular image as input. We provide a general and easy to obtain reward: the distance travelled by the vehicle without the safety driver taking control. We use a continuous, model-free deep reinforcement learning algorithm, with all exploration and optimisation performed on-vehicle. This demonstrates a new framework for autonomous driving which moves away from reliance on defined logical rules, mapping, and direct supervision. We discuss the challenges and opportunities to scale this approach to a broader range of autonomous driving tasks.