 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Depth via Leveraging Semantics: Self-supervised Monocular Depth Estimation with Both Implicit and Explicit Semantic Guidance
Paper and Code
Feb 11, 2021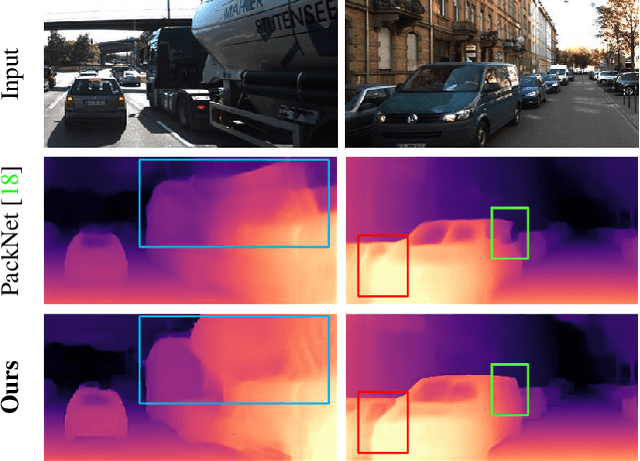
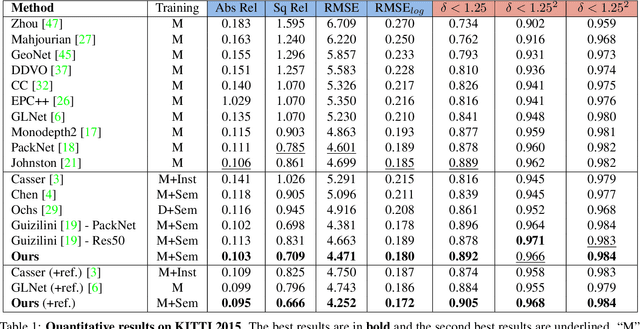
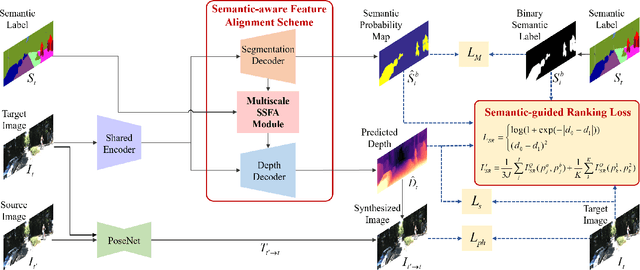

Self-supervised depth estimation has made a great success in learning depth from unlabeled image sequences. While the mappings between image and pixel-wise depth are well-studied in current methods, the correlation between image, depth and scene semantics, however, is less considered. This hinders the network to better understand the real geometry of the scene, since the contextual clues, contribute not only the latent representations of scene depth, but also the straight constraints for depth map. In this paper, we leverage the two benefits by proposing the implicit and explicit semantic guidance for accurate self-supervised depth estimation. We propose a Semantic-aware Spatial Feature Alignment (SSFA) scheme to effectively align implicit semantic features with depth features for scene-aware depth estimation. We also propose a semantic-guided ranking loss to explicitly constrain the estimated depth maps to be consistent with real scene contextual properties. Both semantic label noise and prediction uncertainty is considered to yield reliable depth supervisions. Extensive experimental results show that our method produces high quality depth maps which are consistently superior either on complex scenes or diverse semantic categories, and outperforms the state-of-the-art methods by a significant margin.