 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge-scale Point Cloud Registration Based on Graph Matching Optimization
Paper and Code
Feb 16, 2023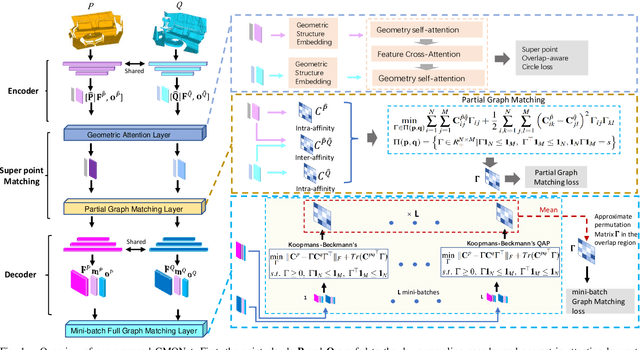



Point Clouds Registration is a fundamental and challenging problem in 3D computer vision. It has been shown that the isometric transformation is an essential property in rigid point cloud registration, but the existing methods only utilize it in the outlier rejection stage. In this paper, we emphasize that the isometric transformation is also important in the feature learning stage for improving registration quality. We propose a \underline{G}raph \underline{M}atching \underline{O}ptimization based \underline{Net}work (denoted as GMONet for short), which utilizes the graph matching method to explicitly exert the isometry preserving constraints in the point feature learning stage to improve %refine the point representation. Specifically, we %use exploit the partial graph matching constraint to enhance the overlap region detection abilities of super points ($i.e.,$ down-sampled key points) and full graph matching to refine the registration accuracy at the fine-level overlap region. Meanwhile, we leverage the mini-batch sampling to improve the efficiency of the full graph matching optimization. Given high discriminative point features in the evaluation stage, we utilize the RANSAC approach to estimate the transformation between the scanned pairs. The proposed method has been evaluated on the 3DMatch/3DLoMatch benchmarks and the KITTI benchmark. The experimental results show that our method achieves competitive performance compared with the existing state-of-the-art baselines.