 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKnowledge Graph Driven UAV Cognitive Semantic Communication Systems for Efficient Object Detection
Paper and Code
Jan 25, 2024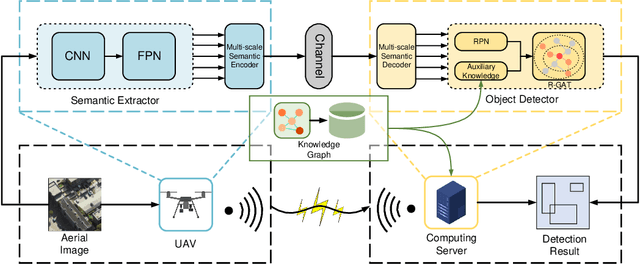
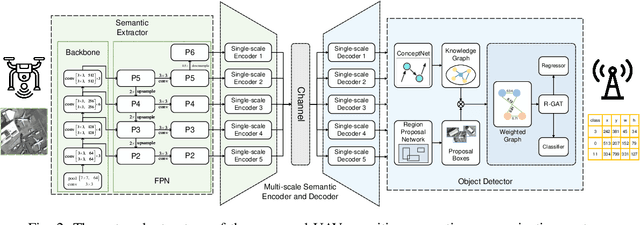
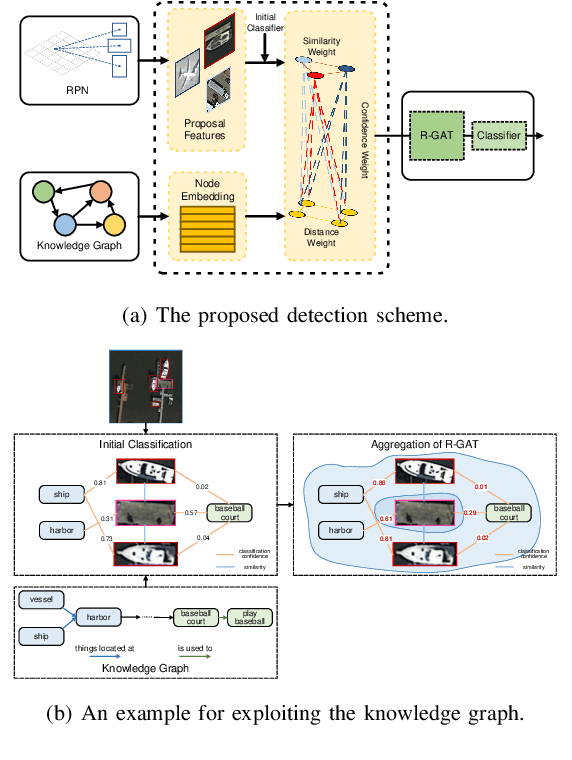
Unmanned aerial vehicles (UAVs) are widely used for object detection. However, the existing UAV-based object detection systems are subject to the serious challenge, namely, the finite computation, energy and communication resources, which limits the achievable detection performance. In order to overcome this challenge, a UAV cognitive semantic communication system is proposed by exploiting knowledge graph. Moreover, a multi-scale compression network is designed for semantic compression to reduce data transmission volume while guaranteeing the detection performance. Furthermore, an object detection scheme is proposed by using the knowledge graph to overcome channel noise interference and compression distortion. Simulation results conducted on the practical aerial image dataset demonstrate that compared to the benchmark systems, our proposed system has superior detection accuracy, communication robustness and computation efficiency even under high compression rates and low signal-to-noise ratio (SNR) conditions.