 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKilometer-scale autonomous navigation in subarctic forests: challenges and lessons learned
Paper and Code
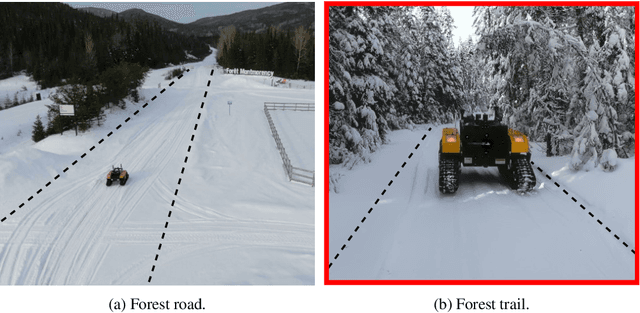
Challenges inherent to autonomous wintertime navigation in forests include lack of reliable a Global Navigation Satellite System (GNSS) signal, low feature contrast, high illumination variations and changing environment. This type of off-road environment is an extreme case of situations autonomous cars could encounter in northern regions. Thus, it is important to understand the impact of this harsh environment on autonomous navigation systems. To this end, we present a field report analyzing teach-and-repeat navigation in a subarctic region while subject to large variations of meteorological conditions. First, we describe the system, which relies on point cloud registration to localize a mobile robot through a boreal forest, while simultaneously building a map. We experimentally evaluate this system in over 18.6 km of autonomous navigation in the teach-and-repeat mode. We show that dense vegetation perturbs the GNSS signal, rendering it unsuitable for navigation in forest trails. Furthermore, we highlight the increased uncertainty related to localizing using point cloud registration in forest corridors. We demonstrate that it is not snow precipitation, but snow accumulation that affects our system's ability to localize within the environment. Finally, we expose some lessons learned and challenges from our field campaign to support better experimental work in winter conditions.