 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKCRL: Krasovskii-Constrained Reinforcement Learning with Guaranteed Stability in Nonlinear Dynamical Systems
Paper and Code
Jun 03, 2022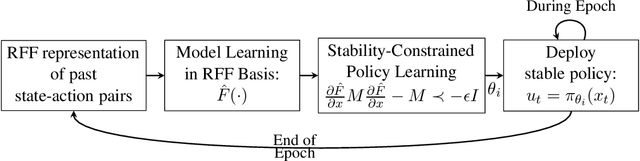
Learning a dynamical system requires stabilizing the unknown dynamics to avoid state blow-ups. However, current reinforcement learning (RL) methods lack stabilization guarantees, which limits their applicability for the control of safety-critical systems. We propose a model-based RL framework with formal stability guarantees, Krasovskii Constrained RL (KCRL), that adopts Krasovskii's family of Lyapunov functions as a stability constraint. The proposed method learns the system dynamics up to a confidence interval using feature representation, e.g. Random Fourier Features. It then solves a constrained policy optimization problem with a stability constraint based on Krasovskii's method using a primal-dual approach to recover a stabilizing policy. We show that KCRL is guaranteed to learn a stabilizing policy in a finite number of interactions with the underlying unknown system. We also derive the sample complexity upper bound for stabilization of unknown nonlinear dynamical systems via the KCRL framework.