 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInventing Relational State and Action Abstractions for Effective and Efficient Bilevel Planning
Paper and Code
Mar 17, 2022

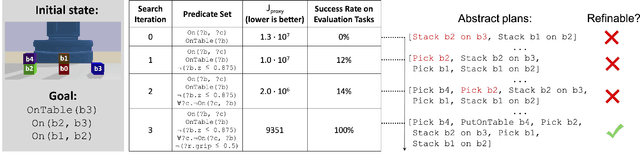

Effective and efficient planning in continuous state and action spaces is fundamentally hard, even when the transition model is deterministic and known. One way to alleviate this challenge is to perform bilevel planning with abstractions, where a high-level search for abstract plans is used to guide planning in the original transition space. In this paper, we develop a novel framework for learning state and action abstractions that are explicitly optimized for both effective (successful) and efficient (fast) bilevel planning. Given demonstrations of tasks in an environment, our data-efficient approach learns relational, neuro-symbolic abstractions that generalize over object identities and numbers. The symbolic components resemble the STRIPS predicates and operators found in AI planning, and the neural components refine the abstractions into actions that can be executed in the environment. Experimentally, we show across four robotic planning environments that our learned abstractions are able to quickly solve held-out tasks of longer horizons than were seen in the demonstrations, and can even outperform the efficiency of abstractions that we manually specified. We also find that as the planner configuration varies, the learned abstractions adapt accordingly, indicating that our abstraction learning method is both "task-aware" and "planner-aware." Code: https://tinyurl.com/predicators-release