 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitation Learning as $f$-Divergence Minimization
Paper and Code
May 30, 2019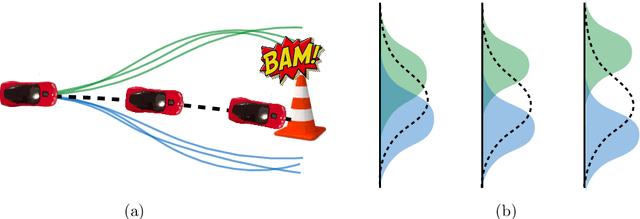

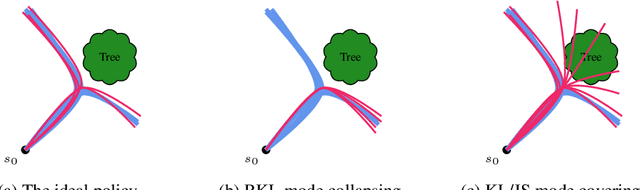
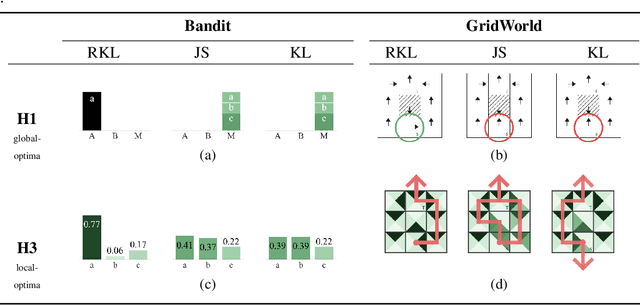
We address the problem of imitation learning with multi-modal demonstrations. Instead of attempting to learn all modes, we argue that in many tasks it is sufficient to imitate any one of them. We show that the state-of-the-art methods such as GAIL and behavior cloning, due to their choice of loss function, often incorrectly interpolate between such modes. Our key insight is to minimize the right divergence between the learner and the expert state-action distributions, namely the reverse KL divergence or I-projection. We propose a general imitation learning framework for estimating and minimizing any f-Divergence. By plugging in different divergences, we are able to recover existing algorithms such as Behavior Cloning (Kullback-Leibler), GAIL (Jensen Shannon) and Dagger (Total Variation). Empirical results show that our approximate I-projection technique is able to imitate multi-modal behaviors more reliably than GAIL and behavior cloning.