 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImagine That! Leveraging Emergent Affordances for Tool Synthesis in Reaching Tasks
Paper and Code
Nov 06, 2019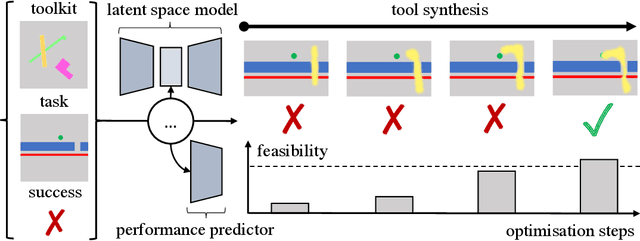
In this paper we investigate an artificial agent's ability to perform task-focused tool synthesis via imagination. Our motivation is to explore the richness of information captured by the latent space of an object-centric generative model -- and how to exploit it. In particular, our approach employs activation maximisation of a task-based performance predictor to optimise the latent variable of a structured latent-space model in order to generate tool geometries appropriate for the task at hand. We evaluate our model using a novel dataset of synthetic reaching tasks inspired by the cognitive sciences and behavioural ecology. In doing so we examine the model's ability to imagine tools for increasingly complex scenario types, beyond those seen during training. Our experiments demonstrate that the synthesis process modifies emergent, task-relevant object affordances in a targeted and deliberate way: the agents often specifically modify aspects of the tools which relate to meaningful (yet implicitly learned) concepts such as a tool's length, width and configuration. Our results therefore suggest that task relevant object affordances are implicitly encoded as directions in a structured latent space shaped by experience.