 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImage Quality Assessment for Rigid Motion Compensation
Paper and Code
Oct 09, 2019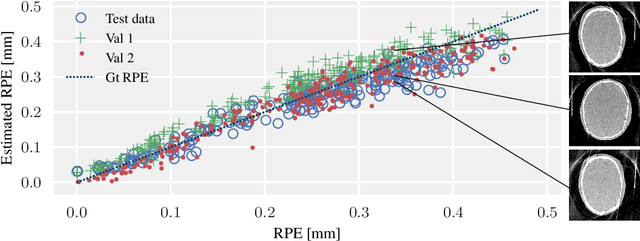
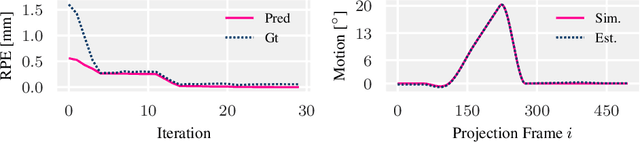
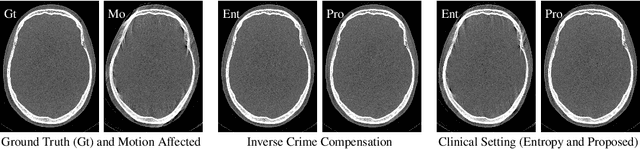
Diagnostic stroke imaging with C-arm cone-beam computed tomography (CBCT) enables reduction of time-to-therapy for endovascular procedures. However, the prolonged acquisition time compared to helical CT increases the likelihood of rigid patient motion. Rigid motion corrupts the geometry alignment assumed during reconstruction, resulting in image blurring or streaking artifacts. To reestablish the geometry, we estimate the motion trajectory by an autofocus method guided by a neural network, which was trained to regress the reprojection error, based on the image information of a reconstructed slice. The network was trained with CBCT scans from 19 patients and evaluated using an additional test patient. It adapts well to unseen motion amplitudes and achieves superior results in a motion estimation benchmark compared to the commonly used entropy-based method.