 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIllusionary Attacks on Sequential Decision Makers and Countermeasures
Paper and Code
Jul 20, 2022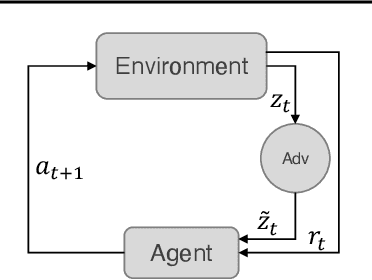
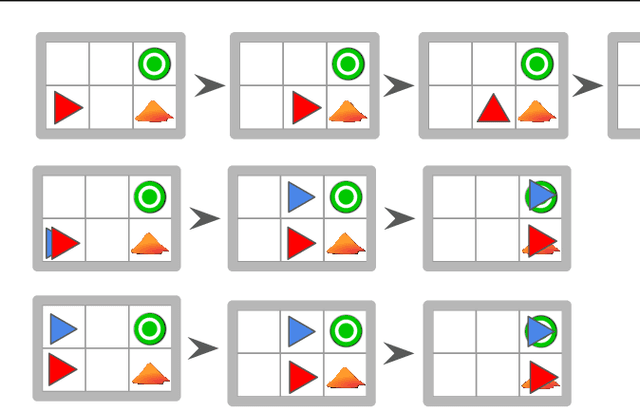
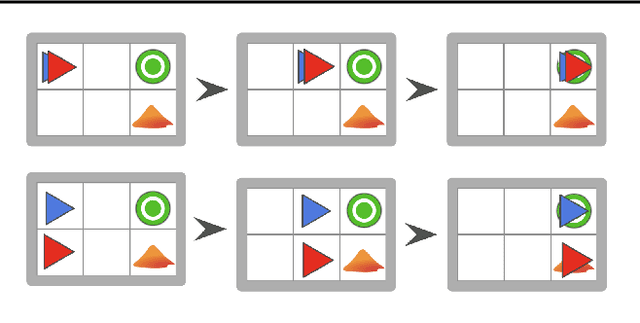
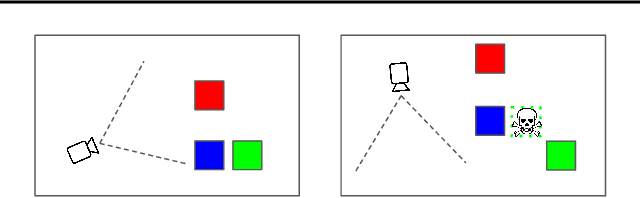
Autonomous intelligent agents deployed to the real-world need to be robust against adversarial attacks on sensory inputs. Existing work in reinforcement learning focuses on minimum-norm perturbation attacks, which were originally introduced to mimic a notion of perceptual invariance in computer vision. In this paper, we note that such minimum-norm perturbation attacks can be trivially detected by victim agents, as these result in observation sequences that are not consistent with the victim agent's actions. Furthermore, many real-world agents, such as physical robots, commonly operate under human supervisors, which are not susceptible to such perturbation attacks. As a result, we propose to instead focus on illusionary attacks, a novel form of attack that is consistent with the world model of the victim agent. We provide a formal definition of this novel attack framework, explore its characteristics under a variety of conditions, and conclude that agents must seek realism feedback to be robust to illusionary attacks.