 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHYLDA: End-to-end Hybrid Learning Domain Adaptation for LiDAR Semantic Segmentation
Paper and Code
Jan 14, 2022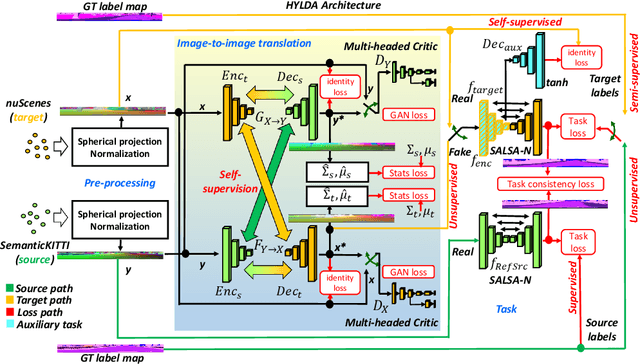
In this paper we address the problem of training a LiDAR semantic segmentation network using a fully-labeled source dataset and a target dataset that only has a small number of labels. To this end, we develop a novel image-to-image translation engine, and couple it with a LiDAR semantic segmentation network, resulting in an integrated domain adaptation architecture we call HYLDA. To train the system end-to-end, we adopt a diverse set of learning paradigms, including 1) self-supervision on a simple auxiliary reconstruction task, 2) semi-supervised training using a few available labeled target domain frames, and 3) unsupervised training on the fake translated images generated by the image-to-image translation stage, together with the labeled frames from the source domain. In the latter case, the semantic segmentation network participates in the updating of the image-to-image translation engine. We demonstrate experimentally that HYLDA effectively addresses the challenging problem of improving generalization on validation data from the target domain when only a few target labeled frames are available for training. We perform an extensive evaluation where we compare HYLDA against strong baseline methods using two publicly available LiDAR semantic segmentation datasets.