 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Robot Motion Retargeting via Neural Latent Optimization
Paper and Code
Mar 16, 2021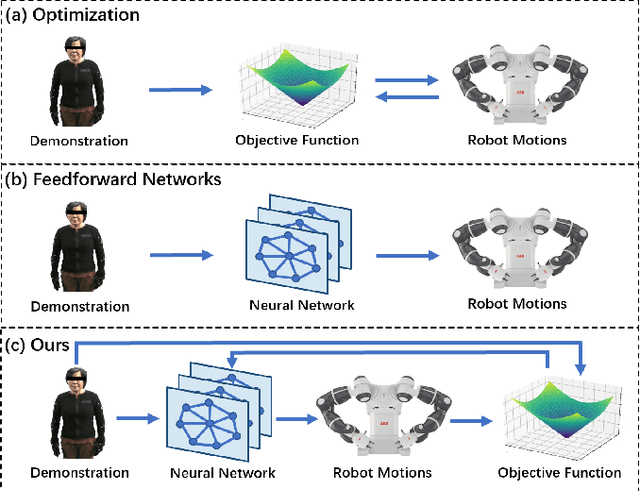
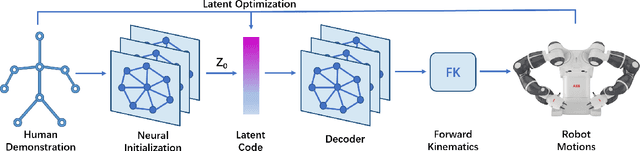
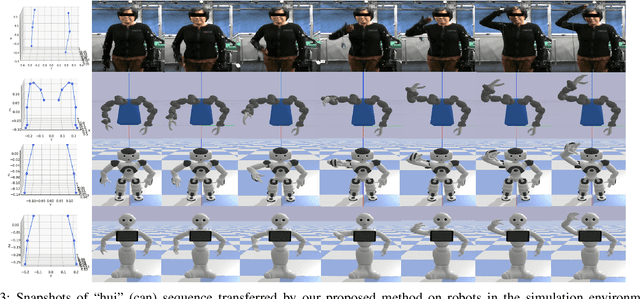
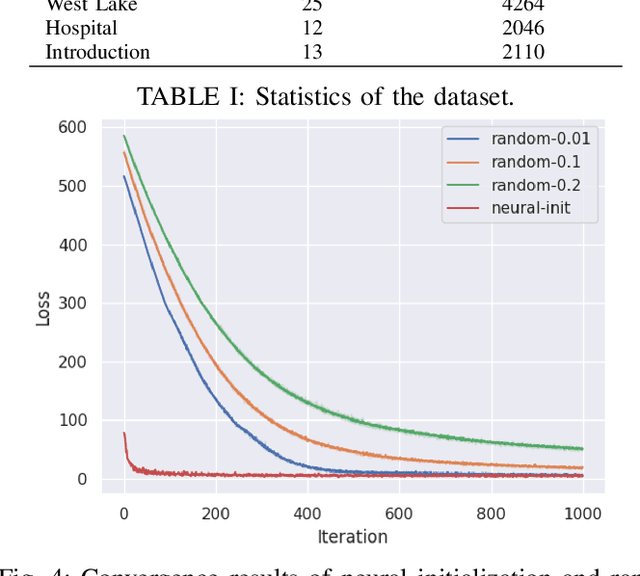
Motion retargeting from human to robot remains a very challenging task due to variations in the structure of humans and robots. Most traditional optimization-based algorithms solve this problem by minimizing an objective function, which is usually time-consuming and heavily dependent on good initialization. In contrast, methods with feedforward neural networks can learn prior knowledge from training data and quickly infer the results, but these methods also suffer from the generalization problem on unseen actions, leading to some infeasible results. In this paper, we propose a novel neural optimization approach taking advantages of both kinds of methods. A graph-based neural network is utilized to establish a mapping between the latent space and the robot motion space. Afterward, the retargeting results can be obtained by searching for the optimal vector in this latent space. In addition, a deep encoder also provides a promising initialization for better and faster convergence. We perform experiments on retargeting Chinese sign language to three different kinds of robots in the simulation environment, including ABB's YuMi dual-arm collaborative robot, NAO and Pepper. A real-world experiment is also conducted on the Yumi robot. Experimental results show that our method can retarget motion from human to robot with both efficiency and accuracy.