 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeightFormer: A Semantic Alignment Monocular 3D Object Detection Method from Roadside Perspective
Paper and Code
Oct 10, 2024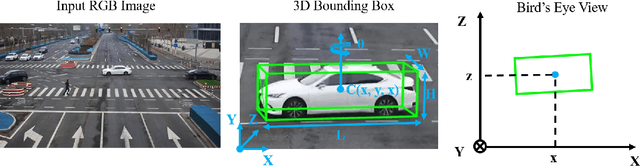
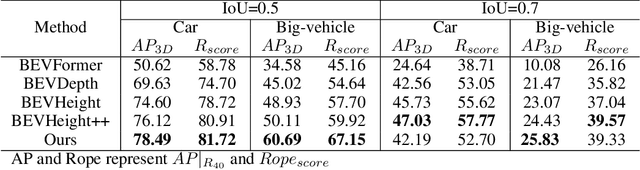
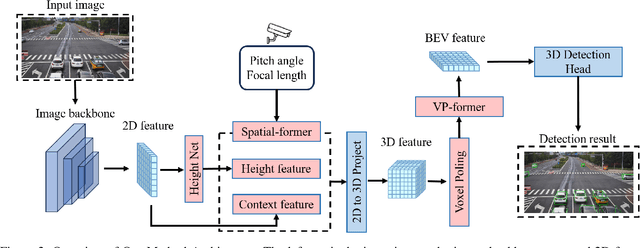
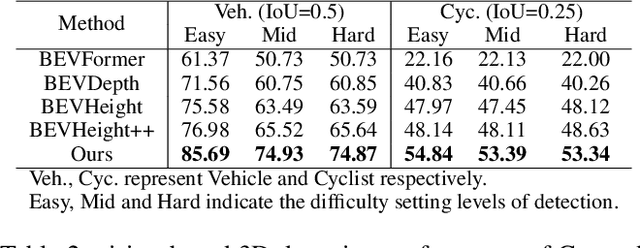
The on-board 3D object detection technology has received extensive attention as a critical technology for autonomous driving, while few studies have focused on applying roadside sensors in 3D traffic object detection. Existing studies achieve the projection of 2D image features to 3D features through height estimation based on the frustum. However, they did not consider the height alignment and the extraction efficiency of bird's-eye-view features. We propose a novel 3D object detection framework integrating Spatial Former and Voxel Pooling Former to enhance 2D-to-3D projection based on height estimation. Extensive experiments were conducted using the Rope3D and DAIR-V2X-I dataset, and the results demonstrated the outperformance of the proposed algorithm in the detection of both vehicles and cyclists. These results indicate that the algorithm is robust and generalized under various detection scenarios. Improving the accuracy of 3D object detection on the roadside is conducive to building a safe and trustworthy intelligent transportation system of vehicle-road coordination and promoting the large-scale application of autonomous driving. The code and pre-trained models will be released on https://anonymous.4open.science/r/HeightFormer.