 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrasp Multiple Objects with One Hand
Paper and Code
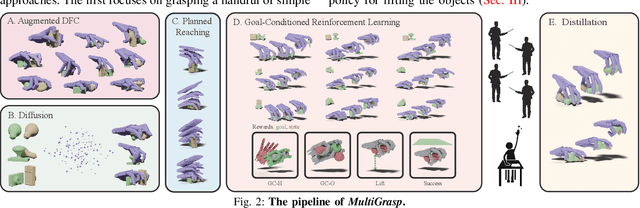
The human hand's complex kinematics allow for simultaneous grasping and manipulation of multiple objects, essential for tasks like object transfer and in-hand manipulation. Despite its importance, robotic multi-object grasping remains underexplored and presents challenges in kinematics, dynamics, and object configurations. This paper introduces MultiGrasp, a two-stage method for multi-object grasping on a tabletop with a multi-finger dexterous hand. It involves (i) generating pre-grasp proposals and (ii) executing the grasp and lifting the objects. Experimental results primarily focus on dual-object grasping and report a 44.13% success rate, showcasing adaptability to unseen object configurations and imprecise grasps. The framework also demonstrates the capability to grasp more than two objects, albeit at a reduced inference speed.