 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobal Tracking via Ensemble of Local Trackers
Paper and Code
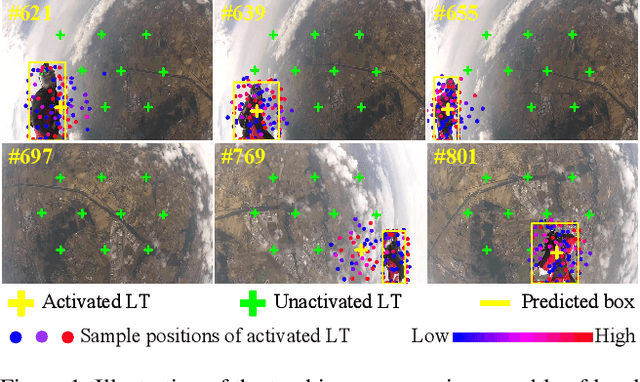
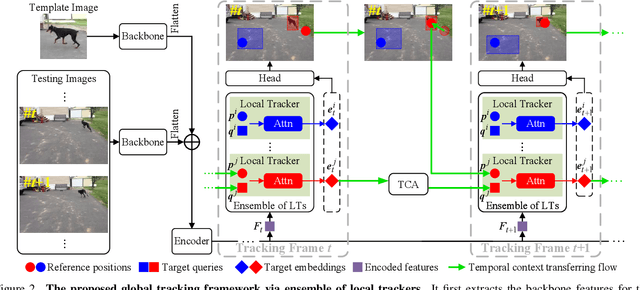
The crux of long-term tracking lies in the difficulty of tracking the target with discontinuous moving caused by out-of-view or occlusion. Existing long-term tracking methods follow two typical strategies. The first strategy employs a local tracker to perform smooth tracking and uses another re-detector to detect the target when the target is lost. While it can exploit the temporal context like historical appearances and locations of the target, a potential limitation of such strategy is that the local tracker tends to misidentify a nearby distractor as the target instead of activating the re-detector when the real target is out of view. The other long-term tracking strategy tracks the target in the entire image globally instead of local tracking based on the previous tracking results. Unfortunately, such global tracking strategy cannot leverage the temporal context effectively. In this work, we combine the advantages of both strategies: tracking the target in a global view while exploiting the temporal context. Specifically, we perform global tracking via ensemble of local trackers spreading the full image. The smooth moving of the target can be handled steadily by one local tracker. When the local tracker accidentally loses the target due to suddenly discontinuous moving, another local tracker close to the target is then activated and can readily take over the tracking to locate the target. While the activated local tracker performs tracking locally by leveraging the temporal context, the ensemble of local trackers renders our model the global view for tracking. Extensive experiments on six datasets demonstrate that our method performs favorably against state-of-the-art algorithms.