 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneral Place Recognition Survey: Towards the Real-world Autonomy Age
Paper and Code
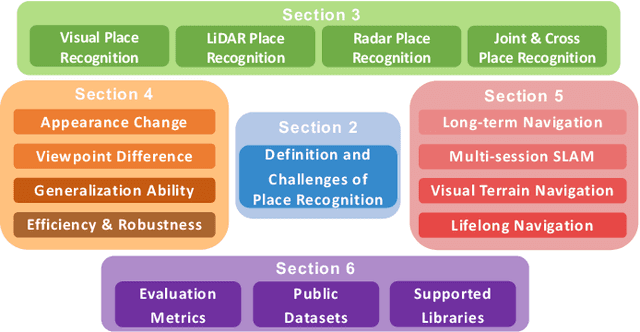
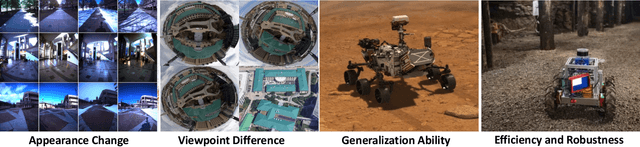
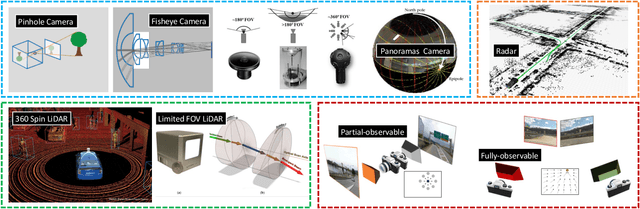
Place recognition is the fundamental module that can assist Simultaneous Localization and Mapping (SLAM) in loop-closure detection and re-localization for long-term navigation. The place recognition community has made astonishing progress over the last $20$ years, and this has attracted widespread research interest and application in multiple fields such as computer vision and robotics. However, few methods have shown promising place recognition performance in complex real-world scenarios, where long-term and large-scale appearance changes usually result in failures. Additionally, there is a lack of an integrated framework amongst the state-of-the-art methods that can handle all of the challenges in place recognition, which include appearance changes, viewpoint differences, robustness to unknown areas, and efficiency in real-world applications. In this work, we survey the state-of-the-art methods that target long-term localization and discuss future directions and opportunities. We start by investigating the formulation of place recognition in long-term autonomy and the major challenges in real-world environments. We then review the recent works in place recognition for different sensor modalities and current strategies for dealing with various place recognition challenges. Finally, we review the existing datasets for long-term localization and introduce our datasets and evaluation API for different approaches. This paper can be a tutorial for researchers new to the place recognition community and those who care about long-term robotics autonomy. We also provide our opinion on the frequently asked question in robotics: Do robots need accurate localization for long-term autonomy? A summary of this work and our datasets and evaluation API is publicly available to the robotics community at: https://github.com/MetaSLAM/GPRS.