 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFighting Fire with Fire: Avoiding DNN Shortcuts through Priming
Paper and Code
Jun 22, 2022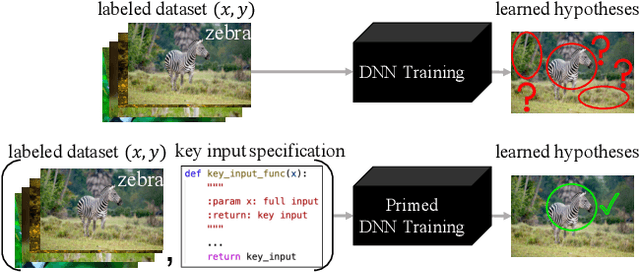
Across applications spanning supervised classification and sequential control, deep learning has been reported to find "shortcut" solutions that fail catastrophically under minor changes in the data distribution. In this paper, we show empirically that DNNs can be coaxed to avoid poor shortcuts by providing an additional "priming" feature computed from key input features, usually a coarse output estimate. Priming relies on approximate domain knowledge of these task-relevant key input features, which is often easy to obtain in practical settings. For example, one might prioritize recent frames over past frames in a video input for visual imitation learning, or salient foreground over background pixels for image classification. On NICO image classification, MuJoCo continuous control, and CARLA autonomous driving, our priming strategy works significantly better than several popular state-of-the-art approaches for feature selection and data augmentation. We connect these empirical findings to recent theoretical results on DNN optimization, and argue theoretically that priming distracts the optimizer away from poor shortcuts by creating better, simpler shortcuts.