 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFastMap: Fast Queries Initialization Based Vectorized HD Map Reconstruction Framework
Paper and Code
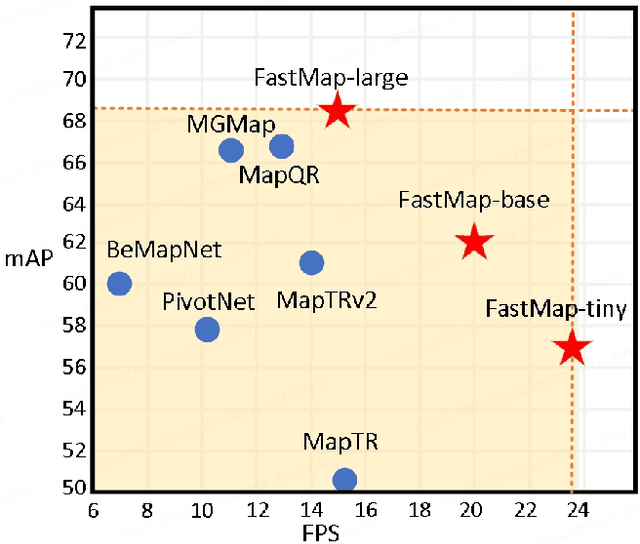
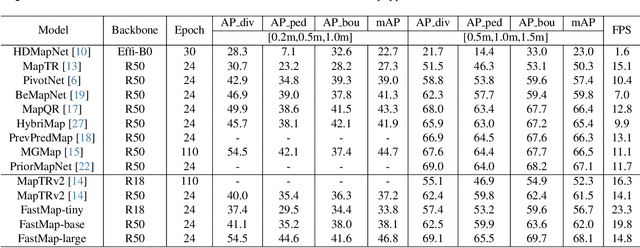
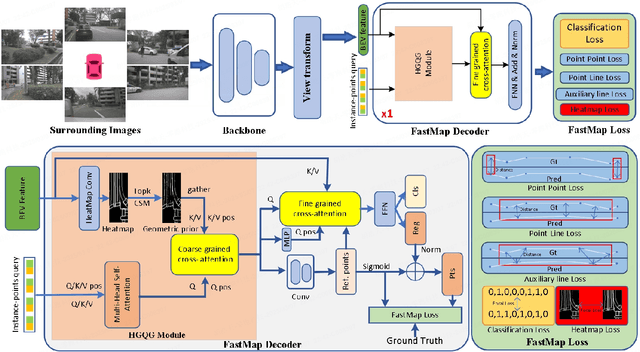
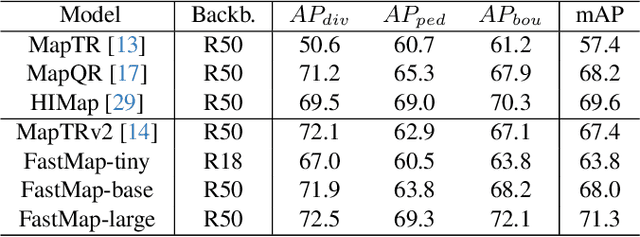
Reconstruction of high-definition maps is a crucial task in perceiving the autonomous driving environment, as its accuracy directly impacts the reliability of prediction and planning capabilities in downstream modules. Current vectorized map reconstruction methods based on the DETR framework encounter limitations due to the redundancy in the decoder structure, necessitating the stacking of six decoder layers to maintain performance, which significantly hampers computational efficiency. To tackle this issue, we introduce FastMap, an innovative framework designed to reduce decoder redundancy in existing approaches. FastMap optimizes the decoder architecture by employing a single-layer, two-stage transformer that achieves multilevel representation capabilities. Our framework eliminates the conventional practice of randomly initializing queries and instead incorporates a heatmap-guided query generation module during the decoding phase, which effectively maps image features into structured query vectors using learnable positional encoding. Additionally, we propose a geometry-constrained point-to-line loss mechanism for FastMap, which adeptly addresses the challenge of distinguishing highly homogeneous features that often arise in traditional point-to-point loss computations. Extensive experiments demonstrate that FastMap achieves state-of-the-art performance in both nuScenes and Argoverse2 datasets, with its decoder operating 3.2 faster than the baseline. Code and more demos are available at https://github.com/hht1996ok/FastMap.