 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFastHand: Fast Hand Pose Estimation From A Monocular Camera
Paper and Code
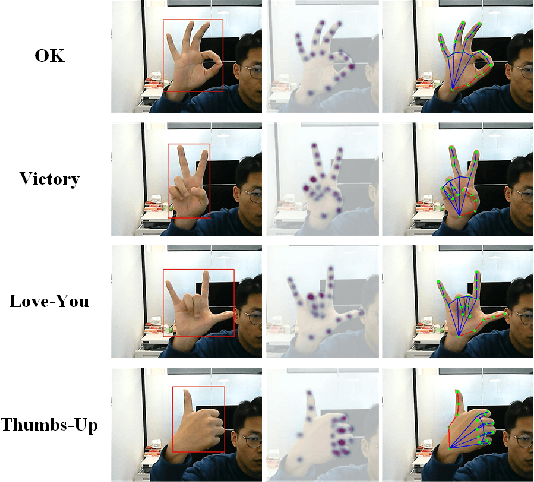

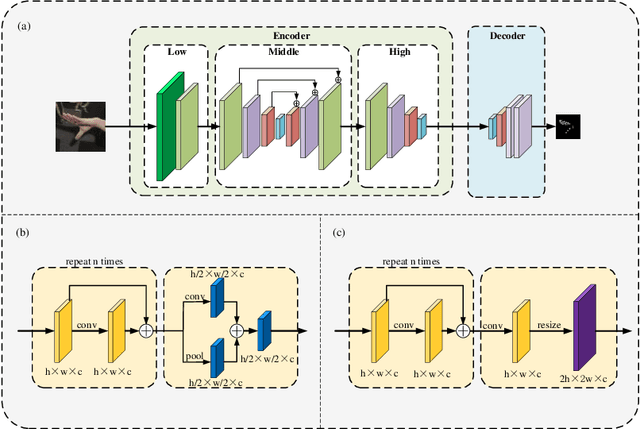

Hand gesture recognition constitutes the initial step in most methods related to human-robot interaction. There are two key challenges in this task. The first one corresponds to the difficulty of achieving stable and accurate hand landmark predictions in real-world scenarios, while the second to the decreased time of forward inference. In this paper, we propose a fast and accurate framework for hand pose estimation, dubbed as "FastHand". Using a lightweight encoder-decoder network architecture, we achieve to fulfil the requirements of practical applications running on embedded devices. The encoder consists of deep layers with a small number of parameters, while the decoder makes use of spatial location information to obtain more accurate results. The evaluation took place on two publicly available datasets demonstrating the improved performance of the proposed pipeline compared to other state-of-the-art approaches. FastHand offers high accuracy scores while reaching a speed of 25 frames per second on an NVIDIA Jetson TX2 graphics processing unit.