 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Continuous Foothold Adaptation for Dynamic Locomotion through CNNs
Paper and Code
Feb 15, 2019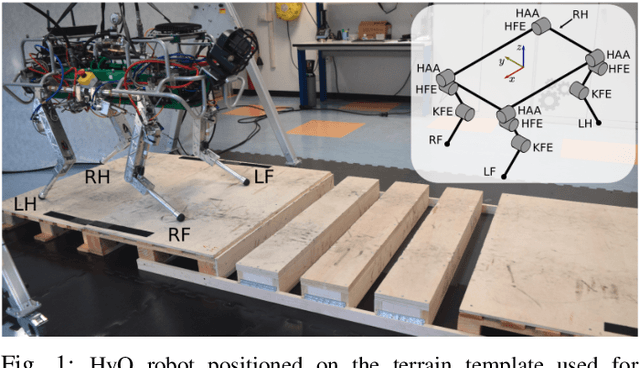
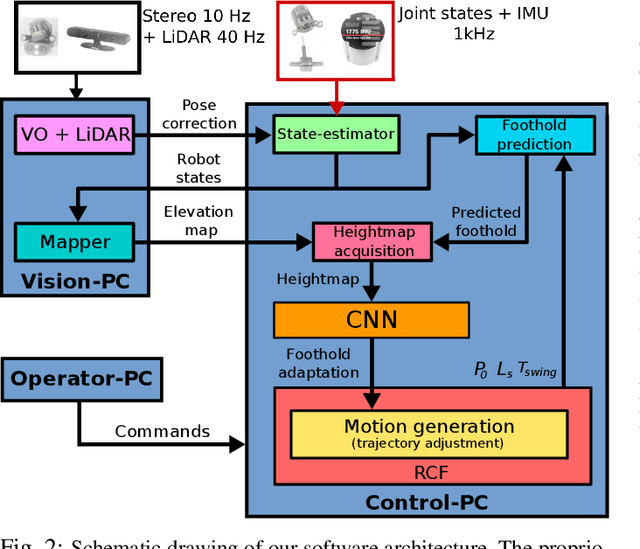
Legged robots can outperform wheeled machines for most navigation tasks across unknown and rough terrains. For such tasks, visual feedback is a fundamental asset to provide robots with terrain-awareness. However, robust dynamic locomotion on difficult terrains with real-time performance guarantees remains a challenge. We present here a real-time, dynamic foothold adaptation strategy based on visual feedback. Our method adjusts the landing position of the feet in a fully reactive manner, using only on-board computers and sensors. The correction is computed and executed continuously along the swing phase trajectory of each leg. To efficiently adapt the landing position, we implement a self-supervised foothold classifier based on a Convolutional Neural Network (CNN). Our method results in an up to 200 times faster computation with respect to the full-blown heuristics. Our goal is to react to visual stimuli from the environment, bridging the gap between blind reactive locomotion and purely vision-based planning strategies. We assess the performance of our method on the dynamic quadruped robot HyQ, executing static and dynamic gaits (at speeds up to 0.5 m/s) in both simulated and real scenarios; the benefit of safe foothold adaptation is clearly demonstrated by the overall robot behavior.