 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEquiBot: SIM(3)-Equivariant Diffusion Policy for Generalizable and Data Efficient Learning
Paper and Code
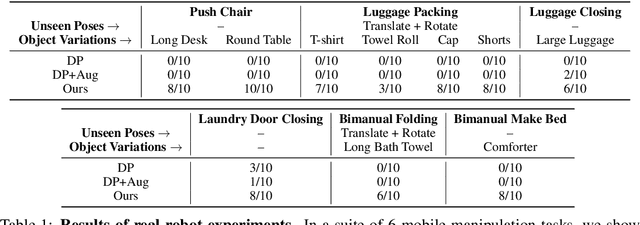
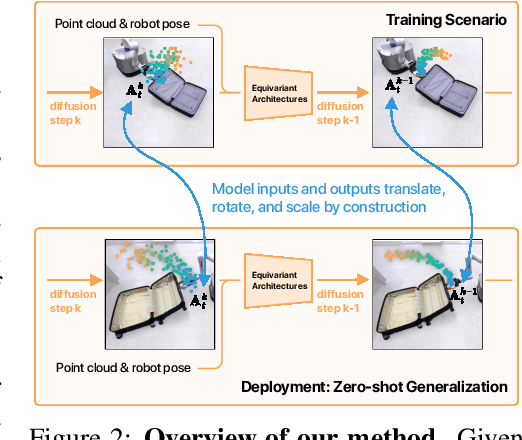
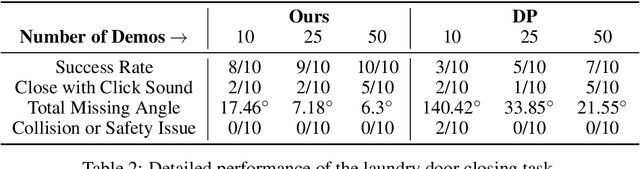
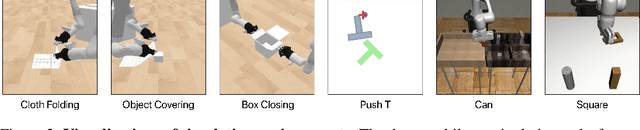
Building effective imitation learning methods that enable robots to learn from limited data and still generalize across diverse real-world environments is a long-standing problem in robot learning. We propose EquiBot, a robust, data-efficient, and generalizable approach for robot manipulation task learning. Our approach combines SIM(3)-equivariant neural network architectures with diffusion models. This ensures that our learned policies are invariant to changes in scale, rotation, and translation, enhancing their applicability to unseen environments while retaining the benefits of diffusion-based policy learning such as multi-modality and robustness. We show in a suite of 6 simulation tasks that our proposed method reduces the data requirements and improves generalization to novel scenarios. In the real world, we show with in total 10 variations of 6 mobile manipulation tasks that our method can easily generalize to novel objects and scenes after learning from just 5 minutes of human demonstrations in each task.