 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Generalizable 6D Pose Tracking of an In-Hand Object with Tactile Sensing
Paper and Code
Oct 08, 2022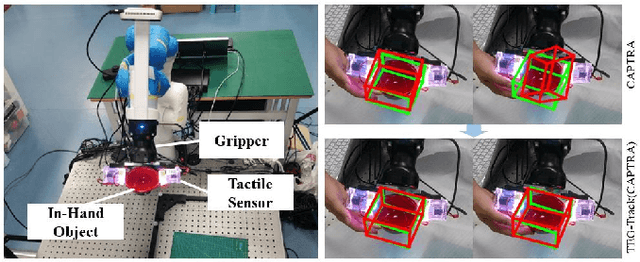
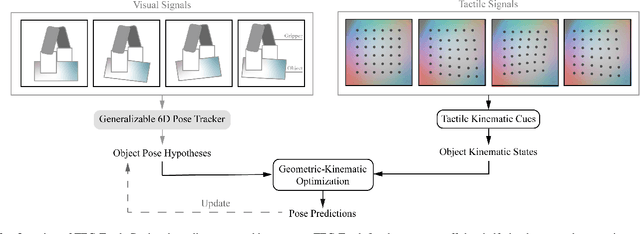
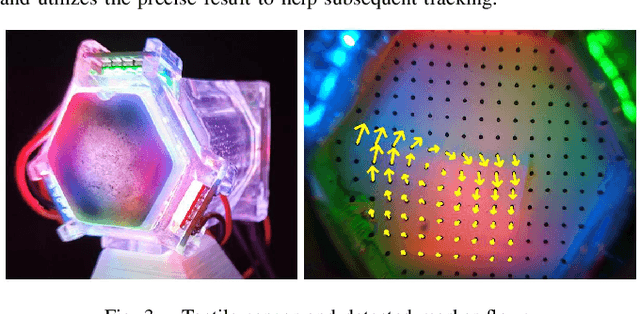

While holding and manipulating an object, humans track the object states through vision and touch so as to achieve complex tasks. However, nowadays the majority of robot research perceives object states just from visual signals, hugely limiting the robotic manipulation abilities. This work presents a tactile-enhanced generalizable 6D pose tracking design named TEG-Track to track previously unseen in-hand objects. TEG-Track extracts tactile kinematic cues of an in-hand object from consecutive tactile sensing signals. Such cues are incorporated into a geometric-kinematic optimization scheme to enhance existing generalizable visual trackers. To test our method in real scenarios and enable future studies on generalizable visual-tactile tracking, we collect a real visual-tactile in-hand object pose tracking dataset. Experiments show that TEG-Track significantly improves state-of-the-art generalizable 6D pose trackers in both synthetic and real cases.