 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEffective Motion Modeling for UAV-platform Multiple Object Tracking with Re-Margin Loss
Paper and Code
Jul 15, 2024

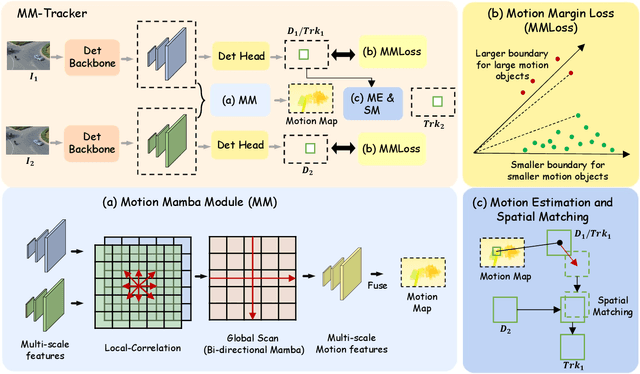
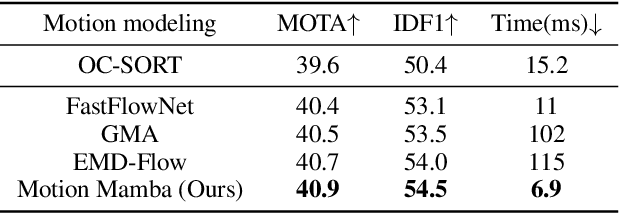
Multiple object tracking (MOT) from unmanned aerial vehicle (UAV) platforms requires efficient motion modeling. This is because UAV-MOT faces tracking difficulties caused by large and irregular motion, and insufficient training due to the motion long-tailed distribution of current UAV-MOT datasets. Previous UAV-MOT methods either extract motion and detection features redundantly or supervise motion model in a sparse scheme, which limited their tracking performance and speed. To this end, we propose a flowing-by-detection module to realize accurate motion modeling with a minimum cost. Focusing on the motion long-tailed problem that were ignored by previous works, the flow-guided margin loss is designed to enable more complete training of large moving objects. Experiments on two widely open-source datasets show that our proposed model can successfully track objects with large and irregular motion and outperform existing state-of-the-art methods in UAV-MOT tasks.