 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEdge-Selective Feature Weaving for Point Cloud Matching
Paper and Code
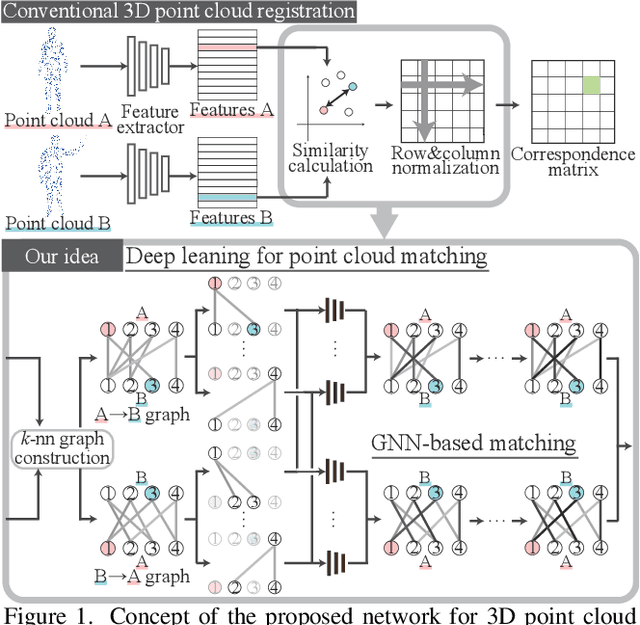
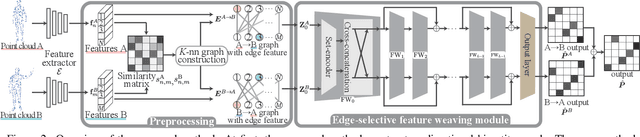
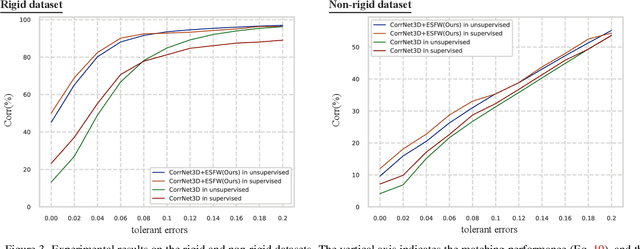

This paper tackles the problem of accurately matching the points of two 3D point clouds. Most conventional methods improve their performance by extracting representative features from each point via deep-learning-based algorithms. On the other hand, the correspondence calculation between the extracted features has not been examined in depth, and non-trainable algorithms (e.g. the Sinkhorn algorithm) are frequently applied. As a result, the extracted features may be forcibly fitted to a non-trainable algorithm. Furthermore, the extracted features frequently contain stochastically unavoidable errors, which degrades the matching accuracy. In this paper, instead of using a non-trainable algorithm, we propose a differentiable matching network that can be jointly optimized with the feature extraction procedure. Our network first constructs graphs with edges connecting the points of each point cloud and then extracts discriminative edge features by using two main components: a shared set-encoder and an edge-selective cross-concatenation. These components enable us to symmetrically consider two point clouds and to extract discriminative edge features, respectively. By using the extracted discriminative edge features, our network can accurately calculate the correspondence between points. Our experimental results show that the proposed network can significantly improve the performance of point cloud matching. Our code is available at https://github.com/yanarin/ESFW