 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEdge Robotics: Edge-Computing-Accelerated Multi-Robot Simultaneous Localization and Mapping
Paper and Code
Jan 24, 2022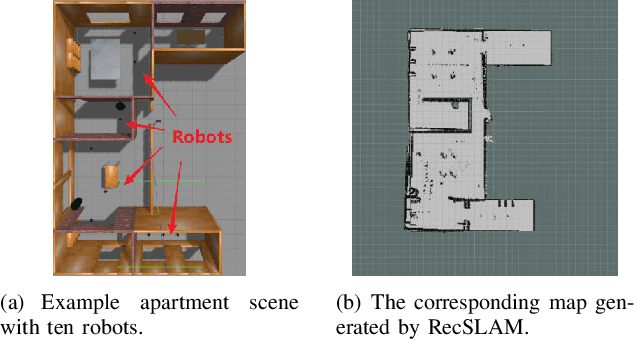


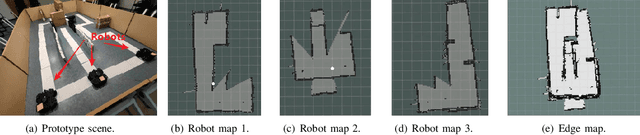
With the wide penetration of smart robots in multifarious fields, Simultaneous Localization and Mapping (SLAM) technique in robotics has attracted growing attention in the community. Yet collaborating SLAM over multiple robots still remains challenging due to performance contradiction between the intensive graphics computation of SLAM and the limited computing capability of robots. While traditional solutions resort to the powerful cloud servers acting as an external computation provider, we show by real-world measurements that the significant communication overhead in data offloading prevents its practicability to real deployment. To tackle these challenges, this paper promotes the emerging edge computing paradigm into multi-robot SLAM and proposes RecSLAM, a multi-robot laser SLAM system that focuses on accelerating map construction process under the robot-edge-cloud architecture. In contrast to conventional multi-robot SLAM that generates graphic maps on robots and completely merges them on the cloud, RecSLAM develops a hierarchical map fusion technique that directs robots' raw data to edge servers for real-time fusion and then sends to the cloud for global merging. To optimize the overall pipeline, an efficient multi-robot SLAM collaborative processing framework is introduced to adaptively optimize robot-to-edge offloading tailored to heterogeneous edge resource conditions, meanwhile ensuring the workload balancing among the edge servers. Extensive evaluations show RecSLAM can achieve up to 39% processing latency reduction over the state-of-the-art. Besides, a proof-of-concept prototype is developed and deployed in real scenes to demonstrate its effectiveness.