 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDisentangling Object Motion and Occlusion for Unsupervised Multi-frame Monocular Depth
Paper and Code
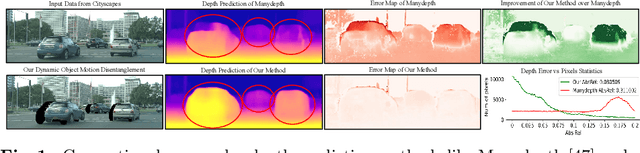
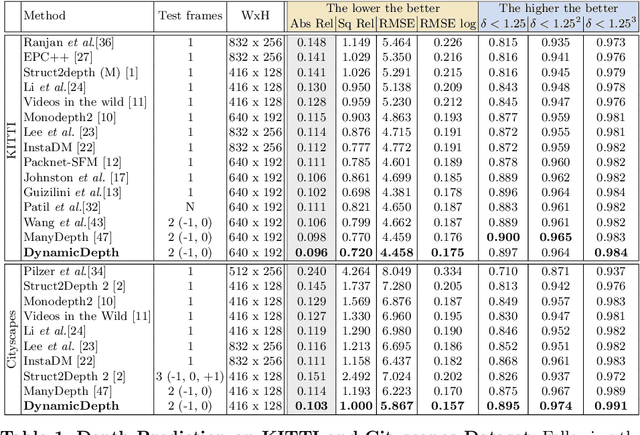
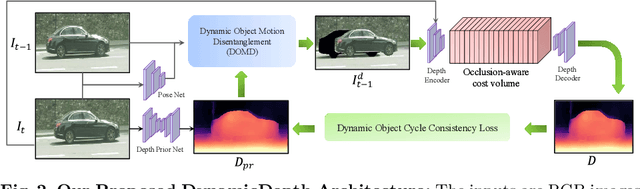
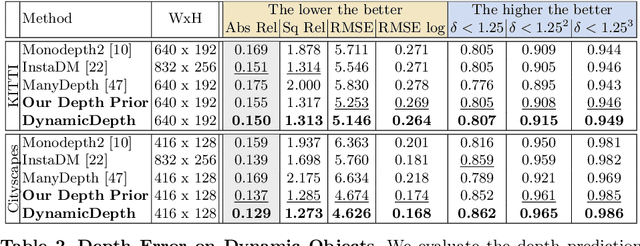
Conventional self-supervised monocular depth prediction methods are based on a static environment assumption, which leads to accuracy degradation in dynamic scenes due to the mismatch and occlusion problems introduced by object motions. Existing dynamic-object-focused methods only partially solved the mismatch problem at the training loss level. In this paper, we accordingly propose a novel multi-frame monocular depth prediction method to solve these problems at both the prediction and supervision loss levels. Our method, called DynamicDepth, is a new framework trained via a self-supervised cycle consistent learning scheme. A Dynamic Object Motion Disentanglement (DOMD) module is proposed to disentangle object motions to solve the mismatch problem. Moreover, novel occlusion-aware Cost Volume and Re-projection Loss are designed to alleviate the occlusion effects of object motions. Extensive analyses and experiments on the Cityscapes and KITTI datasets show that our method significantly outperforms the state-of-the-art monocular depth prediction methods, especially in the areas of dynamic objects. Our code will be made publicly available.