 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDisCoRL: Continual Reinforcement Learning via Policy Distillation
Paper and Code
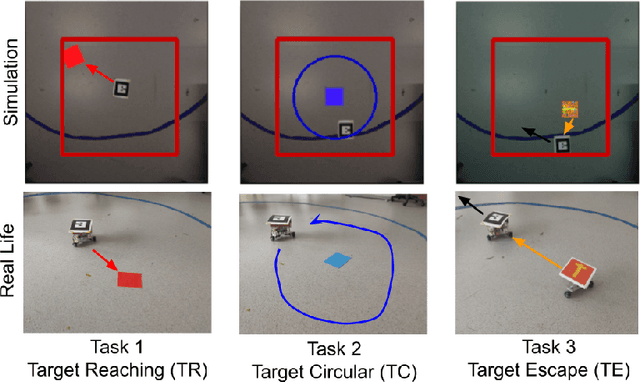
In multi-task reinforcement learning there are two main challenges: at training time, the ability to learn different policies with a single model; at test time, inferring which of those policies applying without an external signal. In the case of continual reinforcement learning a third challenge arises: learning tasks sequentially without forgetting the previous ones. In this paper, we tackle these challenges by proposing DisCoRL, an approach combining state representation learning and policy distillation. We experiment on a sequence of three simulated 2D navigation tasks with a 3 wheel omni-directional robot. Moreover, we tested our approach's robustness by transferring the final policy into a real life setting. The policy can solve all tasks and automatically infer which one to run.