 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffusion-Based 3D Human Pose Estimation with Multi-Hypothesis Aggregation
Paper and Code
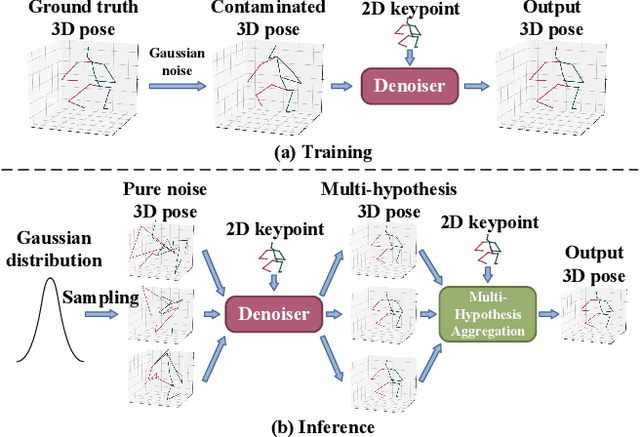
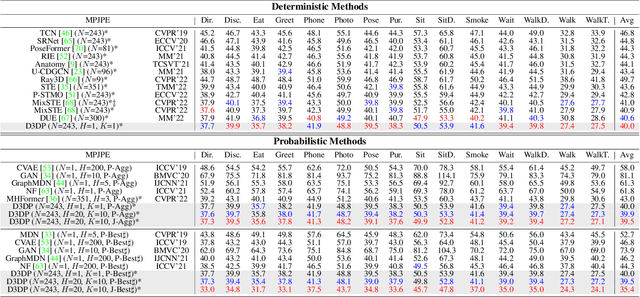

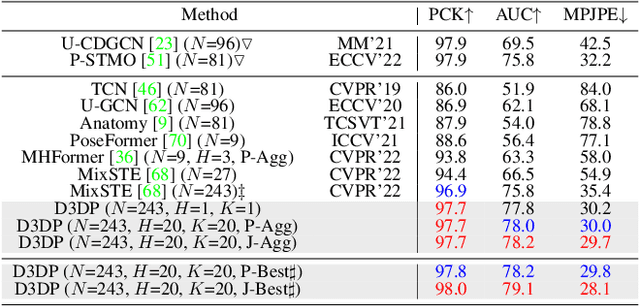
In this paper, a novel Diffusion-based 3D Pose estimation (D3DP) method with Joint-wise reProjection-based Multi-hypothesis Aggregation (JPMA) is proposed for probabilistic 3D human pose estimation. On the one hand, D3DP generates multiple possible 3D pose hypotheses for a single 2D observation. It gradually diffuses the ground truth 3D poses to a random distribution, and learns a denoiser conditioned on 2D keypoints to recover the uncontaminated 3D poses. The proposed D3DP is compatible with existing 3D pose estimators and supports users to balance efficiency and accuracy during inference through two customizable parameters. On the other hand, JPMA is proposed to assemble multiple hypotheses generated by D3DP into a single 3D pose for practical use. It reprojects 3D pose hypotheses to the 2D camera plane, selects the best hypothesis joint-by-joint based on the reprojection errors, and combines the selected joints into the final pose. The proposed JPMA conducts aggregation at the joint level and makes use of the 2D prior information, both of which have been overlooked by previous approaches. Extensive experiments on Human3.6M and MPI-INF-3DHP datasets show that our method outperforms the state-of-the-art deterministic and probabilistic approaches by 1.5% and 8.9%, respectively. Code is available at https://github.com/paTRICK-swk/D3DP.