 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiff-Reg v1: Diffusion Matching Model for Registration Problem
Paper and Code
Mar 29, 2024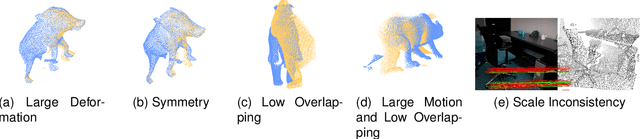
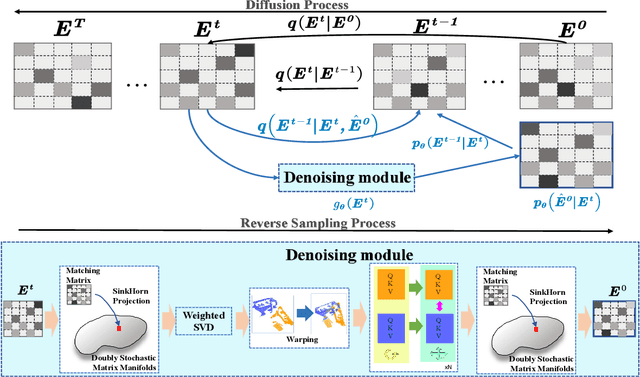
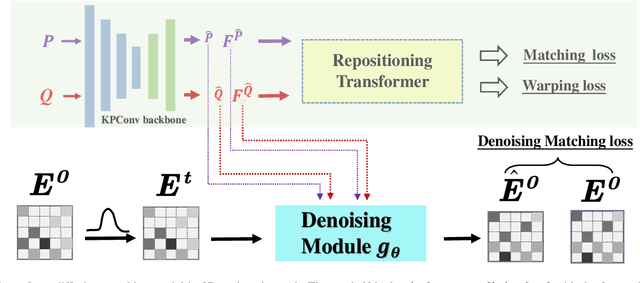
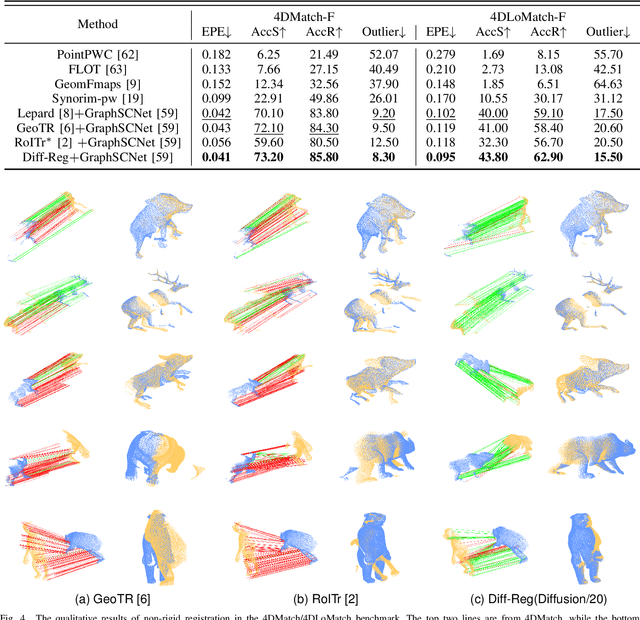
Establishing reliable correspondences is essential for registration tasks such as 3D and 2D3D registration. Existing methods commonly leverage geometric or semantic point features to generate potential correspondences. However, these features may face challenges such as large deformation, scale inconsistency, and ambiguous matching problems (e.g., symmetry). Additionally, many previous methods, which rely on single-pass prediction, may struggle with local minima in complex scenarios. To mitigate these challenges, we introduce a diffusion matching model for robust correspondence construction. Our approach treats correspondence estimation as a denoising diffusion process within the doubly stochastic matrix space, which gradually denoises (refines) a doubly stochastic matching matrix to the ground-truth one for high-quality correspondence estimation. It involves a forward diffusion process that gradually introduces Gaussian noise into the ground truth matching matrix and a reverse denoising process that iteratively refines the noisy matching matrix. In particular, the feature extraction from the backbone occurs only once during the inference phase. Our lightweight denoising module utilizes the same feature at each reverse sampling step. Evaluation of our method on both 3D and 2D3D registration tasks confirms its effectiveness.