 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigning Environments Conducive to Interpretable Robot Behavior
Paper and Code
Jul 02, 2020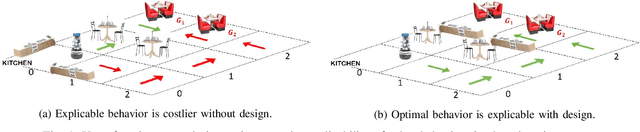
Designing robots capable of generating interpretable behavior is a prerequisite for achieving effective human-robot collaboration. This means that the robots need to be capable of generating behavior that aligns with human expectations and, when required, provide explanations to the humans in the loop. However, exhibiting such behavior in arbitrary environments could be quite expensive for robots, and in some cases, the robot may not even be able to exhibit the expected behavior. Given structured environments (like warehouses and restaurants), it may be possible to design the environment so as to boost the interpretability of the robot's behavior or to shape the human's expectations of the robot's behavior. In this paper, we investigate the opportunities and limitations of environment design as a tool to promote a type of interpretable behavior -- known in the literature as explicable behavior. We formulate a novel environment design framework that considers design over multiple tasks and over a time horizon. In addition, we explore the longitudinal aspect of explicable behavior and the trade-off that arises between the cost of design and the cost of generating explicable behavior over a time horizon.