 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDefo-Net: Learning Body Deformation using Generative Adversarial Networks
Paper and Code
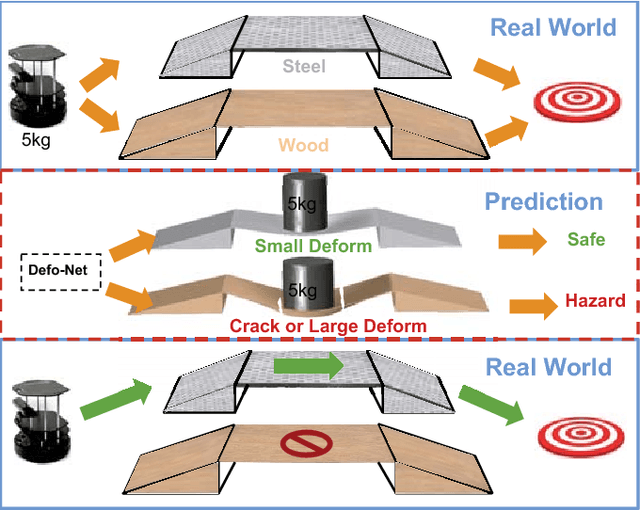
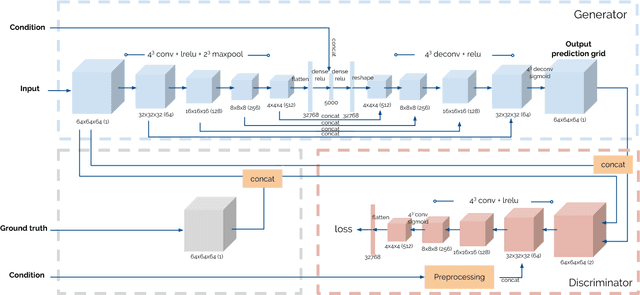
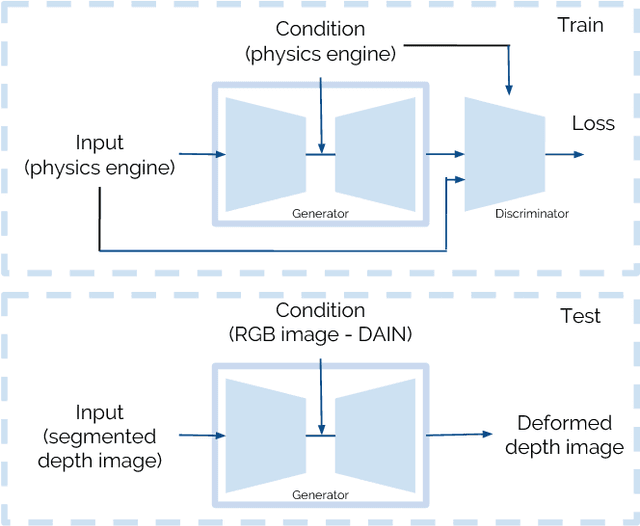
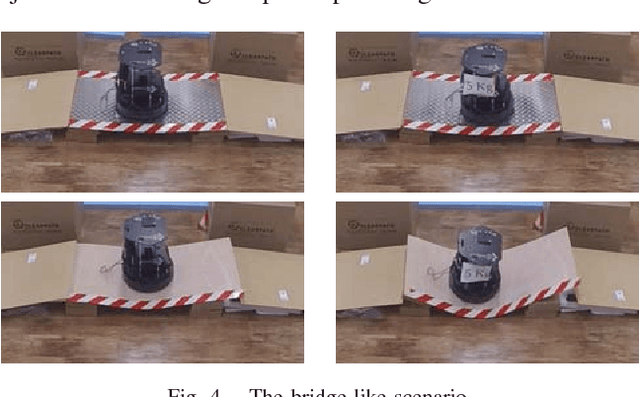
Modelling the physical properties of everyday objects is a fundamental prerequisite for autonomous robots. We present a novel generative adversarial network (Defo-Net), able to predict body deformations under external forces from a single RGB-D image. The network is based on an invertible conditional Generative Adversarial Network (IcGAN) and is trained on a collection of different objects of interest generated by a physical finite element model simulator. Defo-Net inherits the generalisation properties of GANs. This means that the network is able to reconstruct the whole 3-D appearance of the object given a single depth view of the object and to generalise to unseen object configurations. Contrary to traditional finite element methods, our approach is fast enough to be used in real-time applications. We apply the network to the problem of safe and fast navigation of mobile robots carrying payloads over different obstacles and floor materials. Experimental results in real scenarios show how a robot equipped with an RGB-D camera can use the network to predict terrain deformations under different payload configurations and use this to avoid unsafe areas.