 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeD-Grasp: Physically Plausible Dynamic Grasp Synthesis for Hand-Object Interactions
Paper and Code
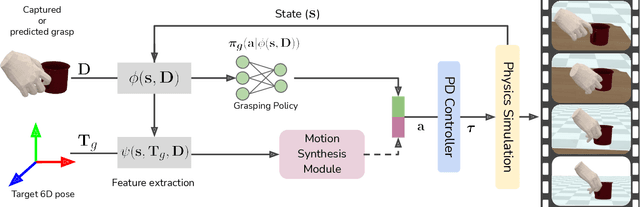
We introduce the dynamic grasp synthesis task: given an object with a known 6D pose and a grasp reference, our goal is to generate motions that move the object to a target 6D pose. This is challenging, because it requires reasoning about the complex articulation of the human hand and the intricate physical interaction with the object. We propose a novel method that frames this problem in the reinforcement learning framework and leverages a physics simulation, both to learn and to evaluate such dynamic interactions. A hierarchical approach decomposes the task into low-level grasping and high-level motion synthesis. It can be used to generate novel hand sequences that approach, grasp, and move an object to a desired location, while retaining human-likeness. We show that our approach leads to stable grasps and generates a wide range of motions. Furthermore, even imperfect labels can be corrected by our method to generate dynamic interaction sequences. Video is available at https://eth-ait.github.io/d-grasp/ .