 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrossViewDiff: A Cross-View Diffusion Model for Satellite-to-Street View Synthesis
Paper and Code
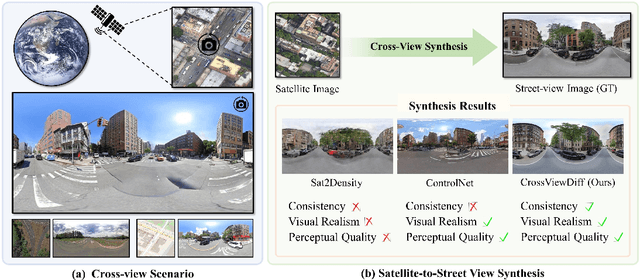
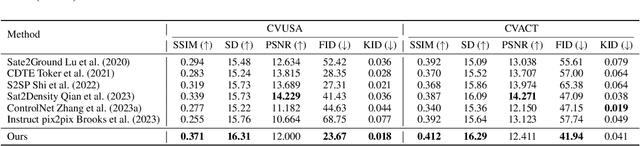


Satellite-to-street view synthesis aims at generating a realistic street-view image from its corresponding satellite-view image. Although stable diffusion models have exhibit remarkable performance in a variety of image generation applications, their reliance on similar-view inputs to control the generated structure or texture restricts their application to the challenging cross-view synthesis task. In this work, we propose CrossViewDiff, a cross-view diffusion model for satellite-to-street view synthesis. To address the challenges posed by the large discrepancy across views, we design the satellite scene structure estimation and cross-view texture mapping modules to construct the structural and textural controls for street-view image synthesis. We further design a cross-view control guided denoising process that incorporates the above controls via an enhanced cross-view attention module. To achieve a more comprehensive evaluation of the synthesis results, we additionally design a GPT-based scoring method as a supplement to standard evaluation metrics. We also explore the effect of different data sources (e.g., text, maps, building heights, and multi-temporal satellite imagery) on this task. Results on three public cross-view datasets show that CrossViewDiff outperforms current state-of-the-art on both standard and GPT-based evaluation metrics, generating high-quality street-view panoramas with more realistic structures and textures across rural, suburban, and urban scenes. The code and models of this work will be released at https://opendatalab.github.io/CrossViewDiff/.