Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClosing the Sim-to-Real Loop: Adapting Simulation Randomization with Real World Experience
Paper and Code
Mar 05, 2019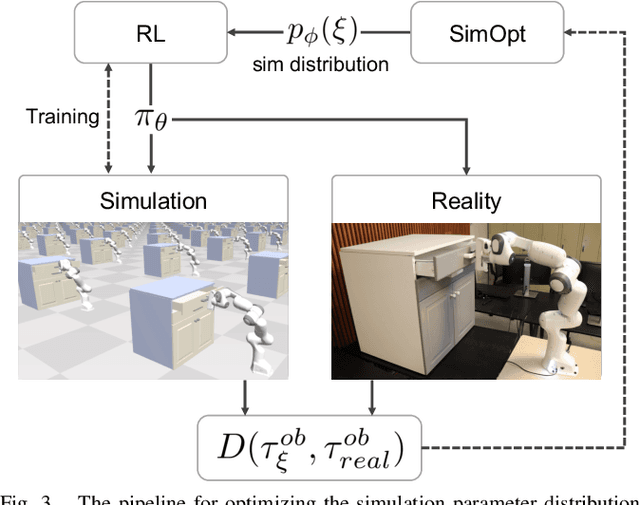
We consider the problem of transferring policies to the real world by training on a distribution of simulated scenarios. Rather than manually tuning the randomization of simulations, we adapt the simulation parameter distribution using a few real world roll-outs interleaved with policy training. In doing so, we are able to change the distribution of simulations to improve the policy transfer by matching the policy behavior in simulation and the real world. We show that policies trained with our method are able to reliably transfer to different robots in two real world tasks: swing-peg-in-hole and opening a cabinet drawer. The video of our experiments can be found at https://sites.google.com/view/simopt
View paper on