 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCertification of Iterative Predictions in Bayesian Neural Networks
Paper and Code
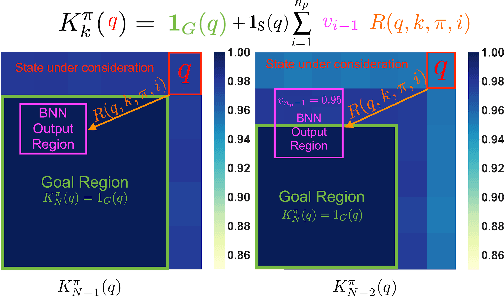
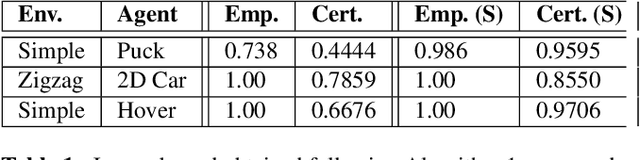
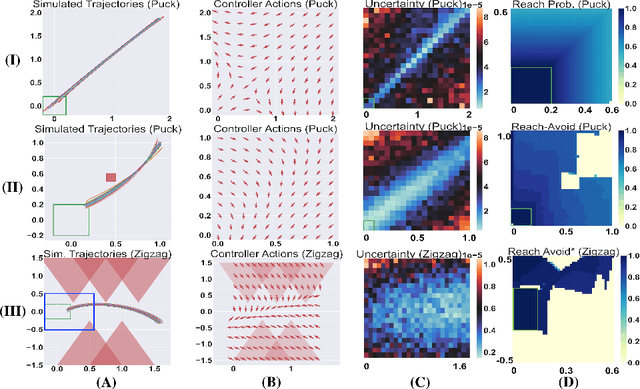
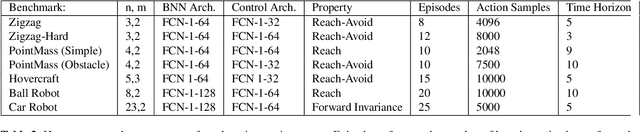
We consider the problem of computing reach-avoid probabilities for iterative predictions made with Bayesian neural network (BNN) models. Specifically, we leverage bound propagation techniques and backward recursion to compute lower bounds for the probability that trajectories of the BNN model reach a given set of states while avoiding a set of unsafe states. We use the lower bounds in the context of control and reinforcement learning to provide safety certification for given control policies, as well as to synthesize control policies that improve the certification bounds. On a set of benchmarks, we demonstrate that our framework can be employed to certify policies over BNNs predictions for problems of more than $10$ dimensions, and to effectively synthesize policies that significantly increase the lower bound on the satisfaction probability.