 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCamera-to-Robot Pose Estimation from a Single Image
Paper and Code
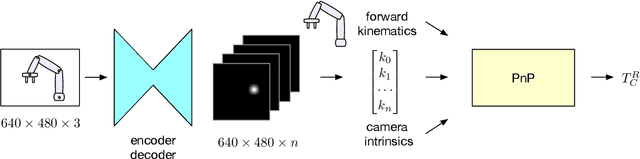
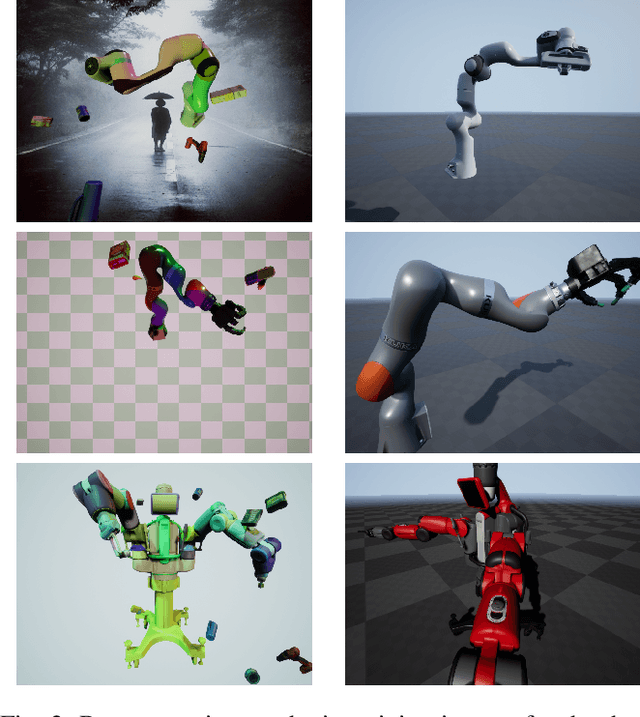
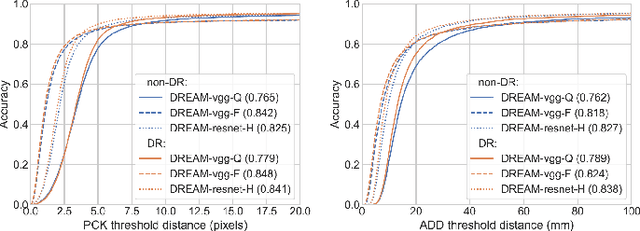
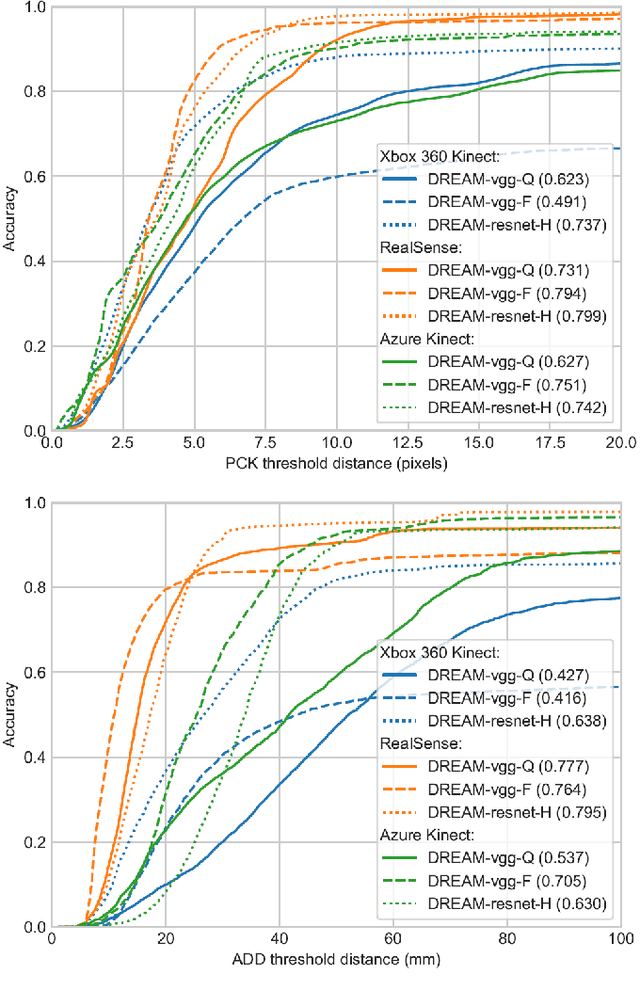
We present an approach for estimating the pose of a camera with respect to a robot from a single image. Our method uses a deep neural network to process an RGB image from the camera to detect 2D keypoints on the robot. The network is trained entirely on simulated data using domain randomization. Perspective-$n$-point (P$n$P) is then used to recover the camera extrinsics, assuming that the joint configuration of the robot manipulator is known. Unlike classic hand-eye calibration systems, our method does not require an off-line calibration step but rather is capable of computing the camera extrinsics from a single frame, thus opening the possibility of on-line calibration. We show experimental results for three different camera sensors, demonstrating that our approach is able to achieve accuracy with a single frame that is better than that of classic off-line hand-eye calibration using multiple frames. With additional frames, accuracy improves even further. Code, datasets, and pretrained models for three widely-used robot manipulators will be made available.