 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging the View Disparity of Radar and Camera Features for Multi-modal Fusion 3D Object Detection
Paper and Code
Aug 25, 2022
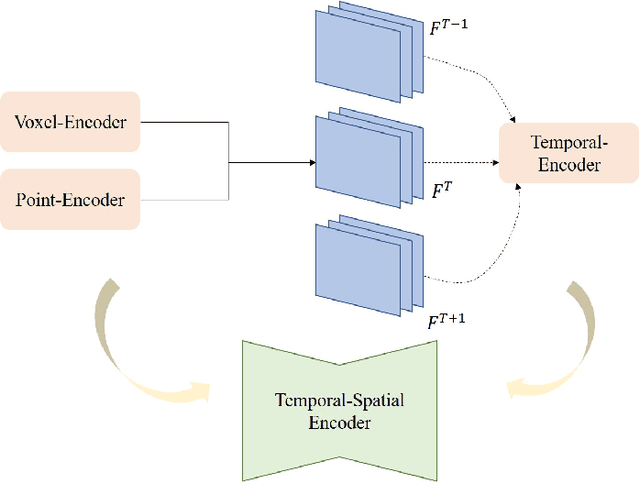

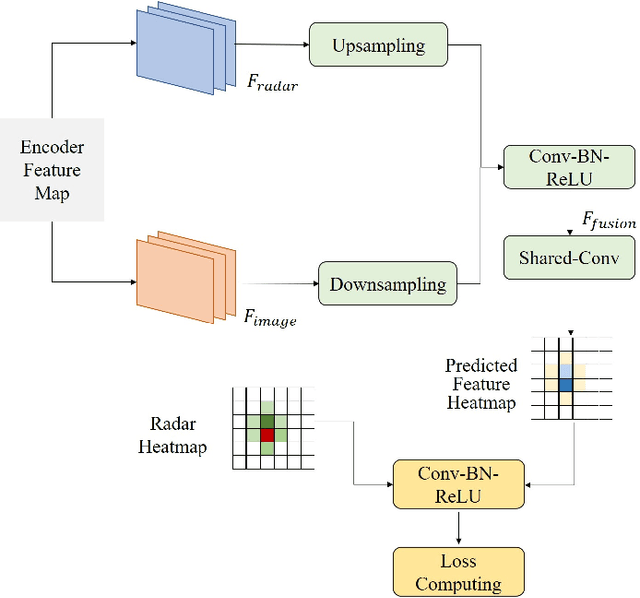
Environmental perception with multi-modal fusion of radar and camera is crucial in autonomous driving to increase the accuracy, completeness, and robustness. This paper focuses on how to utilize millimeter-wave (MMW) radar and camera sensor fusion for 3D object detection. A novel method which realizes the feature-level fusion under bird-eye view (BEV) for a better feature representation is proposed. Firstly, radar features are augmented with temporal accumulation and sent to a temporal-spatial encoder for radar feature extraction. Meanwhile, multi-scale image 2D features which adapt to various spatial scales are obtained by image backbone and neck model. Then, image features are transformed to BEV with the designed view transformer. In addition, this work fuses the multi-modal features with a two-stage fusion model called point fusion and ROI fusion, respectively. Finally, a detection head regresses objects category and 3D locations. Experimental results demonstrate that the proposed method realizes the state-of-the-art performance under the most important detection metrics, mean average precision (mAP) and nuScenes detection score (NDS) on the challenging nuScenes dataset.